
问界M7 Ultra的发布会上,余承东公布了ADS 3.0的首发情况,大概会在8月推出,优先给享界S9用上。虽然没有太多内容关于华为ADS 3.0乾崑,但在享界S9首发盲订背后的PPT暴露了关键词。
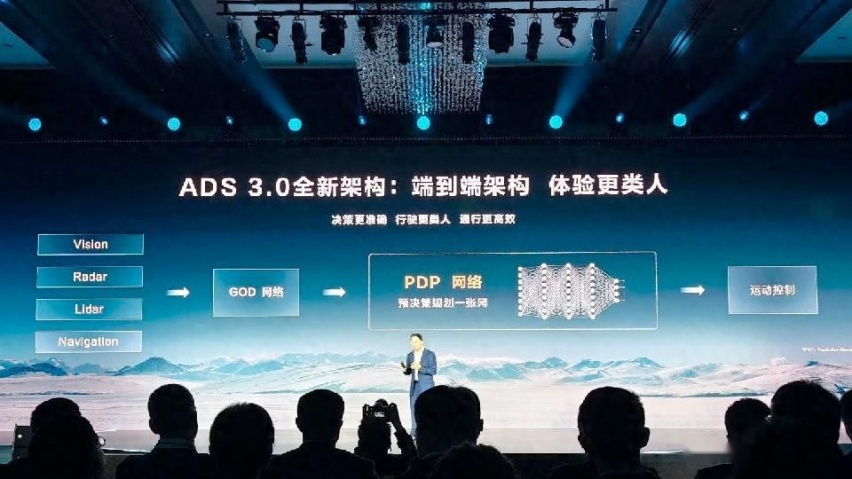
关于ADS 3.0的信息,其实从4月份左右就开始了露出,包括技术层面的升级方向以及硬件上面的一些感知设备增加,变化还是挺大的。最为主要的升级方向,是从ADS 2.0的BEV+GOD网络,换成了统一GOD大网的模式,然后再加上PDP网络融入到系统内。
简而言之,这一被命名为乾崑的ADS 3.0方案,是采用GOD网络负责感知,然后用PDP网络负责预决策规划。来最终实现,细节处理能力更好的辅助驾驶效果,并且在复杂路况、交错路口等情况下的通行率,会有明显提升。
那么,在我们实际用到ADS 3.0系统之后,会在哪些方面有明显提升?
最近的特斯拉FSD落地国内市场的信息,越来越多,大概率今年内就会实现了。所以很容易让人把华为的ADS 3.0和特斯拉的FSD,这两套智能辅助驾驶系统联想在一起。例如,ADS 3.0是不是比FSD更好用、FSD是不是比ADS 3.0更强等问题。不过,现在还无法给出一个定论,究竟谁会更好。
但,华为的这套ADS 3.0会更适合国内交通环境来用。
之所以这么说,是因为ADS 3.0这次主要的升级方向,是对细节感知做更好的补充,以及针对复杂的交通情况做出预测。看得住来这次的升级,就是为了换来更好用的城区NOA使用效果。理解成ADS 2.0把高速NOA的好用程度做到了头,接下来就是为了照顾城区NOA的使用效果了。
先说这套ADS 3.0系统的关键特征。

主要包括了GOD和PDP,两个网络的应用,ADS一代和二代都有BEV网络的身影,到第三代取消了,全部用了GOD网络来做,这是在底层网络上最大的变化。GOD的加入,让辅助驾驶系统实现了简单的障碍物识别功能,然后,现在的GOD做大网之后,包括深度的理解驾驶场景也可以实现,效果是会改善智能驾驶整个的驾乘体验的。
从原先最基本的识别白名单、异形障碍物之外,ADS 3.0系统能对道路结构、场景语义,有更全面的理解能力。而这种技术,是需要更精确的感知来做支撑的。在ADS 3.0这套系统重,硬件部分(高阶版本)是必须包含激光雷达、视觉方案、毫米波雷达(包括4D毫米波)等感知硬件的,激光雷达应该还是192线那颗,补了4D毫米波雷达之后,探测距离280m,精度从20cm提升到了5cm,系统延时降低到了65ms。

在这套配置中,4D毫米雷达的目标是围绕全天候和小目标检测能力,顺带能解决复杂路况下大量动态、静态物体和障碍物的信息捕捉。说简单,就是激光雷达和4D毫米波雷达配合应用就是互补的效果。
然后,是PDP网络让车开的更拟人。
ADS3.0的全新架构采用PDP网络,可以生成一条从当前位置到目标位置的优化路径,还需要考虑到交通规则,以及道路状况和其他交通参与者的会做出的一些行为。而这个PDP网络的应用,也是依托于感知硬件的加强,因为要做出规划路径的操作,需要两个硬性条件路况判断的准确性(感知精度)和路况变化的实时性(低延迟感知)。而用了PDP网络之后的ADS 3.0系统,能让复杂路口通过率超过96%。

举个例子,前一阵有其他车企做智能驾驶测试直播,当车辆自己规划的路径和驾驶员意图有冲突的话,就会间接的“被接管”。而PDP出现的意义,就是让车辆的路径规划,相对来说更符合人类驾驶员的操作习惯,最终保持辅助驾驶功能可以有安全、顺畅的驾驶体验。
补充一个细节,关于CAS 3.0。

全新升级的全向防碰撞系统CAS3.0持续增强前向主动安全能力,并实现了ESA紧急转向辅助再增强。在AEB自动紧急制动刹车距离不足的场景下,系统自动紧急转向避障,不用人为接管。而侧向主动安全,也能支持更多的场景,例如斜穿、横穿的车辆、自行车和电动车,可以更灵活的避让空间。
个人感觉,华为ADS 3.0的这套GOD+PDP的网络方案是对道路状况细节感知上的加强,对比起特斯拉FSD的CNN神经网络方案,主打学习为主,可能更适用于国内的道路状况使用。因为国内的道路状况,存在更多的多样性以及复杂性。

根据上面的网络+硬件感知配置的使用,我们基本可以得出一个结论,这套系统的感知精度会很高,主要针对的场景不再是高速NOA,而是复杂的城市NOA工况。所以,相比于ADS 2.0系统来说,这套系统的投放后会给智能辅助驾驶带来非常明显的改观,但是这种体验上的变化,是会一点点渗透的,而非一蹴而就。
提一句华为在ADS 2.0上的补强,实现了园区到车位的泊车功能。
而到了ADS 3.0系统上的变化,是可以实现从公开道路到园区道路,从园区地面到地下车位的全场景贯通。现在还没有对ADS 3.0的实测机会,但ADS 2.0的实测体验不错,整体流程比较顺畅,和驾驶员开车的感觉很接近,在开放路况下的行驶虽然相对保守,但没有出现接管的情况,即便面对在行车道内无序出现的行人,也没有被迫刹停的情况出现。

不过压着车道线行驶的情况是有出现的,ADS 3.0理论上来说,在感知精度提升一个等级之后,只能做的更好才对。
之后还要再提个ADS 3.0泊车域的功能,支持离车即走。也就是说,到了目的地之后选了目标车位,驾驶员可以走了,车辆会自己泊入车位,不用在原地等。当然,这只是局限于部分商业停车场和部分社区停车场才能实现,依靠的应当是端到端的能力。
端到端实现从感知到规控无损信息传递,智驾更类人。端到端是将神经网络模型引入这三个过程之中,不依赖传统的分阶段处理;而ADS3.0在决策和规控阶段引入了PDP神经网络,是可以对大量的驾驶数据进行学习,按照类人的驾驶风格进行决策和执行。

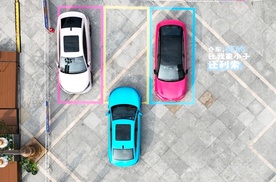
ADS 3.0的投放初期,大部分功能都是针对泊车域进行优化的,那么结合已知的硬件和网络方案分析,ADS 3.0的泊车能不能做到最好用的效果,例如自动泊车零失误这种,不会出现或最大程度的降低自动泊车剐蹭的出行。
理论上来看是具备这种可能性的,尤其是加入4D毫米波雷达之后对感知物体的精度有很大程度提升。放在泊车域端,会对车辆周围的细小的物体比如升降停车位的立柱、底框边缘做到更好的感知,还有侧方停车时候对边缘台阶的感知更好;而且更适用于,那些较为紧凑的停车位工况,基本上就是对越紧凑的、复杂的停车位处理会更轻松。而且,低延迟会提高车辆的执行效率。
用一句话总结ADS3.0提升,更强、更远、细节更好的感知能力,还有更类人的驾驶风格以及更强的主动安全功能。关于这套系统持续的优化方向,优先处理大的长尾场景,例如开放道路-园区-停车场,这基本已经属于无限接近L3或者更高级的辅助驾驶功能,贯穿三个场景最终到达目的地。
而后续的优化,是在打通这些场景后在细节上的优化,例如降低接管率、让车辆在三个场景下的好用程度统一(可能会出现部分场景好用,部分场景体验不佳的情况);最终的效果,可能是达成A点到B点,的全场景使用效果。目前来看,ADS 3.0系统的可玩性和期待值,都是比较不错的。

务本户外便携灯 G5体验!灯被玩出花来?怪不得几万人花200多买它
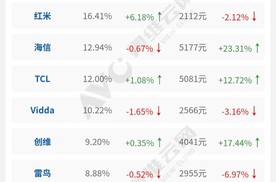
2025年6月,借助618大促、国补等市场和政策红利,线上彩电市场延续了稳健扩张的步伐。奥维云网数据显示,6月整体线上市场规模达到47.57亿元,同比增长11.58%,展现出消费电子领域的持续活力。

全球知名半导体制造商ROHM(总部位于日本京都市)宣布,与中国知名OEM厂商奇瑞汽车股份有限公司(以下简称“奇瑞”)于2025年6月5日在奇瑞总部共同举办的“奇瑞-罗姆供应链技术共创交流日”圆满落幕。

美股投资新趋势解析,XBIT详解美股开户流程及费用优化策略

现代汽车N品牌加速推动中国高性能汽车文化发展

大折叠屏手机重量只有220g左右,厚度比直板手机还要薄。那么,极致轻薄的折叠屏手机,性能会缩水吗?用荣耀Magic V5玩了主流游戏,体验出乎我的意料。

200亿元入局,TCL华星被爆投建8.6代OLED产线,中尺寸OLED面板市场风云再起。

奥维云网数据显示,2025年1-6月线上整体销量达1161.84万台,同比增长7.18%,反映出消费需求的持续释放。在价格层面,线上行业整体均价为1554元,同比小幅上涨3.07%,呈现出量价齐升的格局。

2025年开年空调市场呈现爆发式增长,但繁荣背后暗流涌动。钉科技注意到,奥维云网最新监测数据显示,1-26周(2024年12月30日至2025年6月29日)线上空调总销量高达1694.41万台,同比激增28.17%。然而与销量猛增形成鲜明对比的是行业均价持续下探,同期均价仅为26......

华为乾崑靳玉志:亲自测试ADS 4一个多月,体验非常丝滑
说到特斯拉的槽点,相信很多车主都会吐槽它的语音控制功能,无论是识别能力还是执行能力对比国产新势力们都有着很大差距。

比亚迪在全球率先实现媲美L4级的智能泊车,并用“全面兜底”的承诺,在中国汽车行业掀起巨浪。
全民智驾,全秦进化!作为本次OTA的重要车型,7月11日,秦L“全秦进化,泊车无忧”活动在天津举办,数百名余名媒体、用户莅临现场,抢先体验“天神之眼”的新功能,共鉴这场智能科技盛宴。

全栈华为乾崑赋能猛士M817 开启智能越野新时代

为什么265K处理器是玩《三角洲行动》的绝佳选择

智能戒指怎么选?佩戴RingConn智能戒指后,我发现真的是嘎嘎香

神奇的唯品会,2折买到了安踏

皇马“新劳尔”贡萨洛·加西亚凭借卓越的终结能力赢得关注,蓄势在2025/26赛季的西甲联赛中大放异彩。

2025年夏季的持续高温席卷全球,不仅点燃了消费者的“清凉需求”,更彻底激活了空调市场的爆发式增长。奥维云网数据显示,2025年27周(6.30-7.6)空调线上市场销售额同比激增63%,线下则暴增了120%。

打破使用门槛!绿联DXP4800:小白3分钟也能玩转,操作简单到离谱







































 京公网安备 11010102004670号
京公网安备 11010102004670号