作者 | R
编辑 | 志豪
车东西1月10日消息,日前,小马智行举办了IPO后首次媒体沟通会。
在媒体沟通会上,小马智行Robotaxi北京研发中心的负责人张宁和广州研发中心负责人莫璐怡一起介绍了小马智行过去8年发展,也回答了很多关于Robotaxi、L4自动驾驶和端到端等技术方面的问题。

▲小马智行媒体沟通会现场
一、8年8个小故事 介绍小马智行Robotaxi项目发展在媒体沟通会上,张宁与莫璐怡讲了小马智行过去8年发展的8个小故事。
第一个小故事,2018年2月2日,中国首个落地常态化自动驾驶测试车队成立。
张宁提到,经历了这么多年小马智行终于把自动驾驶无人化常态化的做到了,并且可以向公众运营,进行商业化的收费,到今年小马智行以全球Robotaxi第一股的姿态上市。
张宁表示其实在8年前小马智行做Demo的时候,就已经具备了主驾无人Demo的能力,小马智行很早就具备了进行受控范围、受控线路下进行Demo自动驾驶甚至是无人驾驶的能力。
第二个小故事,2018年12月16日,小马智行在中国首个推出自动驾驶出行服务。
张宁表示小马智行刚刚开始进行自动驾驶的测试,直接就上了无人驾驶了。2018年底的时候小马智行觉得目标不仅是秀肌肉,而是想做产品,真的是想提供服务。
所以小马智行在2018年12月16日推出了中国第一个自动驾驶出行服务,在微信上推出了小马智行小程序,可以通过小程序打到小马智行的车辆,以这样的形式让更多人通过自己可控的方式接入体验流程。
莫璐怡表示小马智行是在中国第一个做Robotaxi的企业,但是其实当时小马智行当时不敢讲Robotaxi。因为当时那个年代政策还不太成熟,还是一个测试阶段,大家一讲到Taxi,又讲讲到运营就很担心。
所以小马智行把这个项目起了一个名字叫区域内的任意点对点出行服务,其实讲的就是Robotaxi这么一个概念。
第三个小片段,2022年1月20日,小马智行发布了全球首个采用车规级硬件的Robotaxi。
张宁表示小马智行首次发布赛那车型已经快三年了,在当时,甚至是到现在来看都是一个很大胆的决定。
张宁提到目前绝大部分今天还在做Robotaxi的公司,真正做L4,真正做无人驾驶的公司,大部分用的还是机械旋转式激光雷达,包括Waymo在内,他们自研的也是机械旋转式雷达,包括这几年的萝卜快跑也好,大家看到都是一个机械的选装式激光雷达。
但张宁表示小马智行在三年前就决定要用车规级的量产件,而不是坚持使用非车规的高性能件。
张宁提到其中有两方面的考量,第一是成本,第二是要去做Robotaxi的服务不是一个秀肌肉的事,而是要求产品设计在未来比如说60万公里的营运里程里,在6年的时间里,能够在风里来雨里去的环境下,能够稳定和可靠。
张宁提到小马智行在可靠性、成本约束的情况下选择了后者,所以当时付出的代价是小马智行整个研发团队要用性能比之前稍差的传感器,以及小马智行要在算力受限的条件下,让算法、模型、AI系统都要重新训练
莫璐怡也透露了一些小马智行下一代车辆的信息,小马智行下一代车辆将真正全面拥抱车规级设备,计算单元也全面革新,是基于车规级芯片,基于Orin做的新一代的计算单元。
莫璐怡表示从2020、2021年开始,小马智行就已经在积累整个自研的域控制器的能力,小马智行的第七代车辆也是从2023年初就启动了新一代车辆的研发。
张宁表示非常有信心可以保证小马智行第七代的设计是可以满足60万公里以上的营运里程要求的,因为中国的商用营运车辆的要求最多就是60万公里,超过60万公里就不能作为营运车辆去服务了。
第四个故事,2023年6月15日,Robotaxi业内首个全无人10小时的直播。
张宁表示当时正是整个L4自动驾驶Robotaxi遭受质疑最多的时间节点。张宁提到出去接受一些老师的采访,很多问题都说现在L2++这么火,做Robotaxi要不要考虑一下同样的拥抱量产,要不要沿途下蛋,要不要找一个大腿抱一抱?类似的问题是比较多的。
当时张宁的回答一直是非常高兴有L2++的蓬勃发展,因为如果没有L2++的蓬勃发展,其实整个智驾,整个自动驾驶依赖的供应链就不会成熟这么快。
L4级别的无人驾驶是很难把极激光雷达的价格给打下来的。但是可以靠L2+大规模的应用和落地,把供应链的价格给打下来,反而助推了L4级别的Robotaxi在成本和供应链的完备性上大幅度跃进,反而让L4落地更快。
当时直播的背景是2022年底小马智行刚刚拿到了北京和广州两地的无人驾驶牌照,真正意义上可以让无人驾驶的姿态开始向公众展示小马智行的能力。
而到了2024年,小马智行已经集齐了北上广深四个一线城市的无人驾驶出行服务许可。
第四个故事,张宁展示了小马智行在北上广深运营区域的今天和明天。
蓝色区域是未来一两年时间Robotaxi落地的示范区的运营面积,红色区域是今天小马智行的运营区域。莫璐怡表示图中蓝色的部分是各地政府已经有非常明确的开放时间表和路线图的地方。
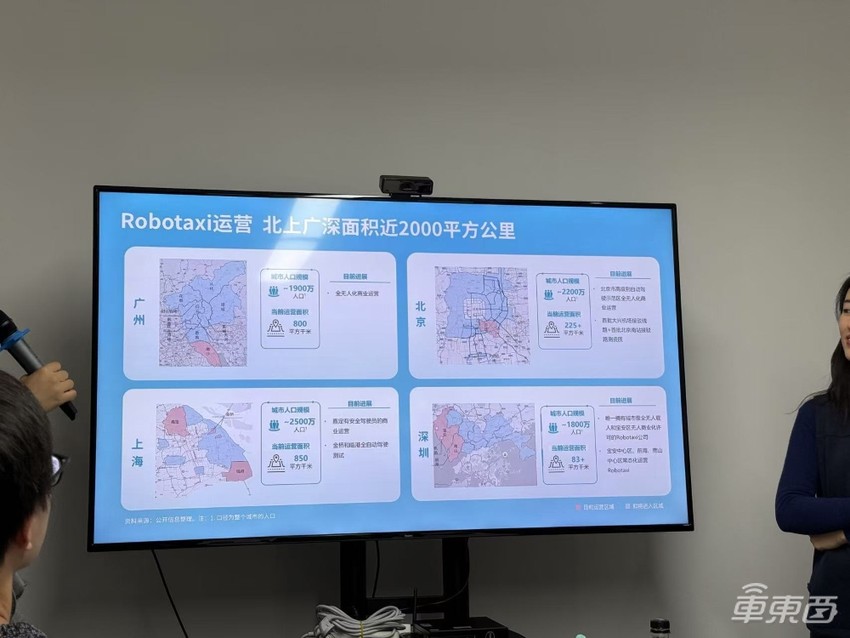
▲小马智行在北上广深运营区域
以广州和北京为例,广州小马智行主要是集中在南沙800公里的区域进行运营。在北京,小马智行主要是以亦庄周边225平方公里的区域,覆盖了一部分大兴到通州的面积,同时也开发了目前到大兴机场,到首都机场、北京南站这些交通枢纽的连通线。
未来,广州是有规划在未来一段时间里可以覆盖全城,而北京可能在2025年,目前政府的时间表是在2025年底,就能够完成北京高级自动驾驶示范区4.0的建设,而4.0的规划范围就是北京四环到六环的区域。
张宁分享的第六个小片段是2024年9月份,北京大兴机场以及所有的高快速连通线首次开放无人驾驶。
张宁表示小马智行是首个拿到高快速路主驾无人测试许可的自动驾驶企业,目前小马智行已经可以提供往返于自动驾驶示范区和大兴机场的自动驾驶出行,在小马智行的APP上也可以预约机场接驳服务。
张宁提到大家突然发现好像做辅助驾驶最简单的就是高速,甚至不是在L2+的年代,而是在L2的年代,就是从ACC的功能,从LCC的功能。
张宁解释道其实对于L2辅助驾驶而言,其实高速路就是一个相对简单的ODD,但是对于无人驾驶而言,因为无人驾驶和辅助驾驶之间,最大的差异是责任二字。自高级别的自动驾驶和辅助驾驶之间的分水岭是由责任的迁移所决定的。
所以张宁认为L4级别的无人驾驶是不允许任何一个点上是不及格的,如果说对剩下百分之一、千分之一甚至是万分之一的场景没有答案的话,那就是不能做,所以很多L4的产品是从低速开始做起的。
第七个信息,张宁表示2024年小马智行一年间宣布了和多个车企合作量产Robotaxi的项目。
首先是小马智行和丰田很早就展开了合作,一个多月之前,小马智行也官宣了我们和北汽新能源基于极狐阿尔法T5车型展开量产上的合作,这也是第七代的系列车型之二。
同时前几周广汽再度深化战略合作,所以基于广汽埃安的车型,也会搭载小马智行的第七代量产平台,这些会是纯电平台的车辆搭载小马智行第七代的方案。

▲小马智行与车企合作车型
莫璐怡也补充了一些这几款车现在的一些进展,第一个是关于丰田铂智4X,这款车概念车、原型车已经正式在道路上进行路测了,在北京、广州,接下来在深圳、上海都会有相应的路测。
关于小马智行和北汽、广汽合作的车辆,它们都同样拥有整个全冗余的线控底盘,有包括除了线控底盘还包括电源的冗余、通讯的冗余等等多重冗余的设置,对L4来说有很大的帮助。
这三款车辆都会搭载第七代软硬件系统,这三款车也会是比较类似的车辆大小,也使得小马智行在第七代的系统去迁移到不同的车型上,研发投入可以尽可能的缩减,也可以加快推出的节奏。
第八个小片段,在所有的Robotaxi当中,小马智行拥有多个网约车和出租车平台的合作伙伴。
早年的时候,2018年小马智行就有了微信小程序,后来小马智行也开发了我们的IOS/安卓双平台的APP,后面小马智行还有一系列的合作,包括支付宝上也有小马智行小程序,小马智行还有高德地图、如祺出行、锦江出行等等,还有很多小马智行在合作的出行平台。

▲小马智行拥有多个网约车和出租车平台的合作伙伴
莫璐怡表示这里不是小马智行合作的所有平台,有一些还没有官宣,未来还将官宣更多的平台和出租车公司。
除此之外,莫璐怡提到小马智行IPO上市的招股说明书当中,有一个参与小马智行IPO的投资者叫康福德高的企业。
康福德高是一个总部在新加坡的企业,在全球,包括中国很多核心城市都有出行领域的布局。小马智行在和他进行战略合作的时候,其实他们对小马智行不仅是无人化技术,也包括整个常态化运营,小马智行未来对运营的这些规划做了大量的尽调和沟通。
除了康福德高和出行平台之外,小马智行也和很多城市的出租车企业也在沟通未来的一些合作。小马智行会很快官宣和一个一线城市的最大出租车公司相应的合作。
张宁提到,从运营视角来讲,大家都觉得小马智行可能不会做得特别专业,但张宁表示其实恰恰相反,在无人驾驶时代,在Robotaxi时代,做运营是非常技术的一件事情。
张宁认为传统的运营商做网约车、做出租车其实是管理人的网络,是一个化整为零的事,但是最后个体户的司机和他的车之间是一对一的。所以大家不太去管你真正意义上的车辆,而是在管人。
到了无人驾驶的时代,其实会逆着来,不再是化整为零,不是一个车队散编成一个个个体的人,而是把一台台车化零为整,能不能把这个车队管理好、调度好,是一个近乎于虚拟工厂的概念。
应该在什么样的时刻让所有车辆到达什么样的位置,什么时候去保养,怎么样数字化管理,什么时候该洗车,什么时候应该回库充电,所有东西都应该严丝合缝,精细化、精益管理,就跟线下工厂是一样的。
张宁表示在这个时代,小马智行依旧拥有很强的运营能力,才能够让小马智行的无人驾驶出行服务可以服务到千家万户。从这一点说,小马智行是愿意跟更多的合作方一起共建这个生态的。
二、认为L2不能逐渐进化成L4 解决大模型幻觉关键在数据标注在沟通会上,小马智行Robotaxi北京研发中心的负责人张宁和广州研发中心负责人莫璐怡也回答了一些相关的问题。
关于小马智行上市了接下来的计划是什么,张宁表示小马智行规划上市后这件事情,早在两三年前我们就已经想清楚了,而且这个答案上市前和上市后从来都没有变化过。
张宁认为要证明L4无人驾驶Robotaxi商业模式可行性,要在五个维度上都做到。
首先,所以这一切的基础先要站在无人驾驶技术的可行性上,要是无人驾驶技术都做不到,一切都是空谈。
第二,有了技术要去推动政策往前走,推动示范区政策不断演进。
第三,拥抱量产。刚刚的小故事当中有政策的部分,也有和各大主机厂量产车型合作的部分。
第四,跟出行平台和运营方一起共建生态,真正能把上千上万台落地,也需要众人拾柴火焰高。
第五,要干成这件大事情,一定要长期坚定不移的技术投入,以及资本支持。现金流对于小马智行依旧很重要,所以第五件事情就是IPO给了小马智行更多持续的现金流的支持。
张宁表示,对于小马而言IPO绝对不是终点,只是一个小的里程碑,能够助推去证明L4大规模商业化道路越走越顺。
张宁相信到2025年的时候,大家一定能看到小马交出一份满意的答卷,去证明L4大规模商业化落地的可行性。
关于L2能不能逐渐进化成L4这个问题,张宁表示不觉得L2能逐渐进化成L4。
张宁表示:“我觉得L2和L4是两个不同的物种,是在不同的约束条件下,不同的指标、几个标准底下诞生的不同的产品。它的最根源的这些纲领性的思想也是不同的。导致可能一家公司的愿景,一家公司老板们最关心的KPI,到管理层落地执行过程当中资源的优先级,到我们下面的工程师做事情方法论,都会导致一层一层的传递下来的不同。所以我本质上不相信沿途下蛋的过程当中,做L2的过程当中就长出一个L4的果子,这件事情是很难的。”
张宁举例表示,像L2的高阶智驾,虽然说从功能角度来说,最好是门到门,车位到车位的一种体验。作为一款在市场上要有竞争力的产品,在智驾的软硬件上能花多少钱呢?2.5万可能已经很多了,整个总体成本这么多钱下去,能不能化为竞争力两说,这个成本是主机厂所能接受的上限了。
通常到现在是1.5万上下的成本空间,甚至希望0.5万元以下的智驾软硬一体的方案,能够做到一个类似纯视觉、无图、端到端、门到门、车位到车位的体验,其实大家(车企、用户)还是价格敏感型用户。
在这样的条件下,你要是一个5000块钱的智驾方案用激光雷达就太奢侈了,安全性的保障完全不足以让在这个市场上找到合适的买家,所以对L2而言,首先是价格敏感型的。
张宁还表示L2与L4智驾的标准不同。对L4无人驾驶来说,在任何场景下,都要妥善处理,甚至是暴雨天突然袭来,前方突然有施工,突然前面有一个大坑,都能去解决。
所以张宁认为,L2方案是一个极致性价比为纲的场景,但是L4有一个安全为先的理念,所以约束条件和及格条件都不一样。
张宁直言表示:“L2+是在一万块钱上下搏杀,能够让它有更多的功能和体验感。而L4是生产力的替代,这台车自娘胎里生下来就有一个老司机的灵魂注入其中。我做的工作是我能取代这个老司机来替我开车,那么一年老司机人工成本可能是10万块钱,你如果说放10万块钱在整个自动驾驶能力上多吗?其实并不多。”
关于端到端和世界模型小马智行做的情况,张宁表示2023年小马智行做了端到端,但是张宁今天依旧认为,不是只要做了端到端就一定能成功。
张宁认为端到端也不能解决所有问题,依旧是一个上限很高但是下限很低的状态,它的下限也需要有人守护。
张宁举例表示:“大语言模型瞎说,唆使人自杀,唆使人种族歧视,对于女权的一些不合适的评论等等,可能都会是大语言模型胡说八道出来的。之前OpenAI的科学家也说对齐很重要。我们觉得从自动驾驶角度来说,因为安全,客观角度来上来讲,交规的存在,物理世界当中的一些模型,最后事故严重的程度,对于事故权责的评判都有一系列的标准,这些就导致我们一定要对安全进行对齐。所以这些部分不可能是一个端到端的模型就可以涵盖其中的。”
另外一点,张宁认为能够助推大范围落地无人驾驶很重要的一点是整个世界模型。
张宁表示:“通过这么多年来的演化,我们把很多的论证,不仅仅是从路测阶段开始验证,而且整个开发过程更多是依赖仿真,在云端进行。我们现在把云端发展成我们的世界模型,是能够让我们不断进化和迭代的一个关键的助推因素,让迭代周期能够越跑越快,能够更快的去产生我们真实的数据,去论证我们的方法是否奏效。而我们的路测更多是最终的终验,而不是开发迭代摸索的过程。”
张宁最后总结到,这些技术点很重要,但是并不决定一家公司最终的成败。
关于关端到端、世界模型的幻觉的问题,张宁表示实际上在看不见的部分有很多数据工作在那里,比如标注。
张宁提到每家主机厂背后可能都有几千个调度在给他们标数据,所以数据闭环本身是不是水龙头的瓶颈,怎么把这些数据变成真实的数据,带标注的数据,这个转化决定了一家公司的消化能力。
张宁举例到:“我们之前收到一些咨询项目,有一些主机厂问我们说,我都已经趴了100PB的数据我不知道怎么用,是不是把数据拿出来晒晒太阳就会自然增长,我们不知道。对于我们来说,用好数据,用最高效的方式用好数据,其实是这样一个命题。”
关于端到端可预测性比较低的问题,张宁觉得帧值是非常重要的,模型也一定程度上是需要去压缩的。
张宁表示:“所以其实车端的模型规模没有大家想象的那么大,很多时候你也提到了所谓的教师模式和学生模式,其实也是在对模型进行一定的蒸馏。你在线下做模型,很多时候是在离线情况下用事后诸葛亮的方式来做这件事情,有更多的计算资源、Latency的压力下你就可以做得更好,你能不能把这一部分能力再蒸馏到线上,这其实是一个技术的思路。”
有关是否使用激光雷达的问题,张宁表示算力上我们一定会用激光雷达的features,从每个激光雷达的features,到vision这些space里面的features,最终还是要通过BEV的方式放到一个BEV的空间里面。
张宁表示:“你不管是后面叫不叫端到端,前面的那一段其实到了BEV的时代,其实都是长得一样的。所以你有没有BEV,你前面这些关于possession features转化的处理已经趋同。所以端到端只不过是说后面能不能把信息无损的更多的进行传递,以及怎么样能够让后面的这些包括到planing这些都可以用到前面的那些features。当然这个里面也会有各种各样的取舍,有一段式的,两段式的,各种各样的讨论。今天不一定要展开这样的讨论。”
关于渐进式玩家做出来的Robotaxi和Waymo包括小马做出来的是不是一个东西,张宁直接表示:“我觉得他们直接复刻特斯拉的说法就好了,就是在现在这个阶段只用说也不用做。我觉得这个可能对于真的L4的玩家,从2023年开始,你如果真的在做Robotaxi,做无人驾驶,那你就应该日常常态化的让人能够打得到无人驾驶的车辆,我觉得这就是一个分水岭。到现在都已经快要到2025年还干说不练,就有点没意思了。”
结语:小马智行IPO后首次媒体沟通会介绍公司发展在这次媒体沟通会上,张宁和莫璐怡通过分享小马智行过去8年的8个小故事,展示了公司在自动驾驶领域的发展和成就。
从中国首个常态化自动驾驶测试车队的成立,到全球首个采用车规级硬件的Robotaxi的发布,再到与多个车企合作量产Robotaxi项目,小马智行不断推动技术进步和行业创新。
张宁和莫璐怡还深入讨论了L2与L4自动驾驶技术的区别,以及端到端模型和世界模型在自动驾驶中的应用等问题,表示小马智行的愿景是通过不断的技术创新和合作伙伴的共同努力,实现L4级别无人驾驶技术的大规模商业化,为公众提供安全、可靠、便捷的出行服务。
随着技术的不断进步和政策的支持,小马智行正朝着这一目标稳步前进,期待在未来,我们能够见证小马智行交出一份满意的答卷,证明L4无人驾驶技术的商业化可行性。

北美汽车业,作为美国汽车业的核心,其生产设施、产品规划、零部件网络以及供应链在过去数十年间已与墨西哥和加拿大形成了紧密的相互依存关系。然而,特朗普发起的贸易战却对这一行业造成了前所未有的冲击,打破了长期形成的区域合作格局。
开着智驾突遭司机昏迷,哪个车险些车毁人亡?

【2025年2月3日,哈尔滨】2月3日,哈尔滨2025年第九届亚冬会火炬传递仪式在哈尔滨盛大启动。极氪009光辉作为火种采集车、火炬传递指挥车,以领先的智能科技与超豪华品质,全程护航火炬传递。吉利控股集团高级副总裁杨学良,奥运冠军、短道速滑男子500米世界纪录保持者、极氪009光......

重磅!中国对美国进口车加征10%关税,福特“印钞机”也在内。

这座南方城市新能源车占比居然高达48%!

堵了14小时的漫哥终于悟了,春节回家就应该开这些车

再等等,今年有5款电混轿车要上,都是一线大厂

国内各个城市销量分析

比亚迪1月销量解读:30万成绩开门红,海外市场迎来新增长

世界是个草台班子?强如特斯拉FSD,被我们的特色马路给整不会了

汽车大规模召回,谁最受伤?

2月1日,吉利汽车控股有限公司(0175.HK)公布最新销量数据:1月乘用车销量266737辆,同比增长约25%,环比增长约27%,开年首月延续热销势头,单月销量首超26万辆。新能源方面,1月吉利汽车新能源销量(含吉利品牌、领克品牌、极氪品牌)121071辆,同比增长约84%,环......

比亚迪仰望U7车顶玩滚珠迷宫,展现极致平衡能力

2025年,智驾有机会能变便宜,但配上能主动调节底盘的新车,价格不会低于25万。

【2025年2月1日,武汉】随着春节佳节的喜庆氛围弥漫开来,家家户户都沉浸在团聚的温馨与欢乐之中,在这个特别的时刻,走亲访友、出游赏景成为了许多人欢度春节的重要方式。岚图汽车凭借其旗下领先一代智能豪华高端MPV——全新岚图梦想家,为全家人带来舒适、智能、安全的出行体验,让每一次出......

吉利控股旗下各品牌的多款智能精品车作为活动保障用车全程护航,助力亚冬圣火顺利传递,迎接将在2月7日正式开幕的这场冰雪体育盛会。

30万以上细分市场,增程车型成用户的首选?

虽然不能漂移,但跑山不成问题。这次仰望U8用比亚迪天神之眼可是直接上了广州从化石门国家森林公园的山路,而且园区内道路也能城市领航。看来“全国都能开,有路都好开”,并不只是广告词,而是真的做得到。#让自驾游变智驾游#

广汽集团董事会选举冯兴亚为董事长

集五福都听说过,而这次我们要开着吉利银河E5,带大家一起去集“年味”,并且还是五种不同的粤式年味,看看有没有你熟悉的你年味氛围











































 京公网安备 11010102004670号
京公网安备 11010102004670号