
理想i8上市之后,很多消费者的一个疑问是:35万元的理想i8凭什么?当时发布会上的一个问题很明显,理想i8的静态感知似乎没有和竞争对手拉开差距,而它的动态体验好像各家表述出来都差不多。所以,理想i8在发布时更像是一款“水桶车”,没有特别长的一块长板,也就让外界认为这款车不过是理想“复制粘贴”的又一款产品。
然而,在我们体验了理想i8上市即可用的“理想VLA司机大模型”后,我们才恍然大悟:
理想i8真正的长板,原来是这套全新架构的智能辅助驾驶系统,而且很长、很长。
可以直接给到的一个结论是:理想VLA司机大模型的第一个版本体验就已经和华为ADS 3.3能力不相上下。相比于端到端+VLM的现有版本,理想VLA在平顺性和舒适性上有明显提升,而且防御性驾驶能力会让用户明确感知到安全边际。再加上语音控制驾驶、连续任务、地下车库漫游等细节功能的增加,理想VLA司机大模型应该是最近体验过的智驾辅助系统中最能带来惊喜感的一个版本。
所以驾仕派认为,理想i8的口碑将会在更多的消费者体验完VLA之后迎来反转时刻,理想i8的智驾价值会被很快放大。
01
VLA的实际体验
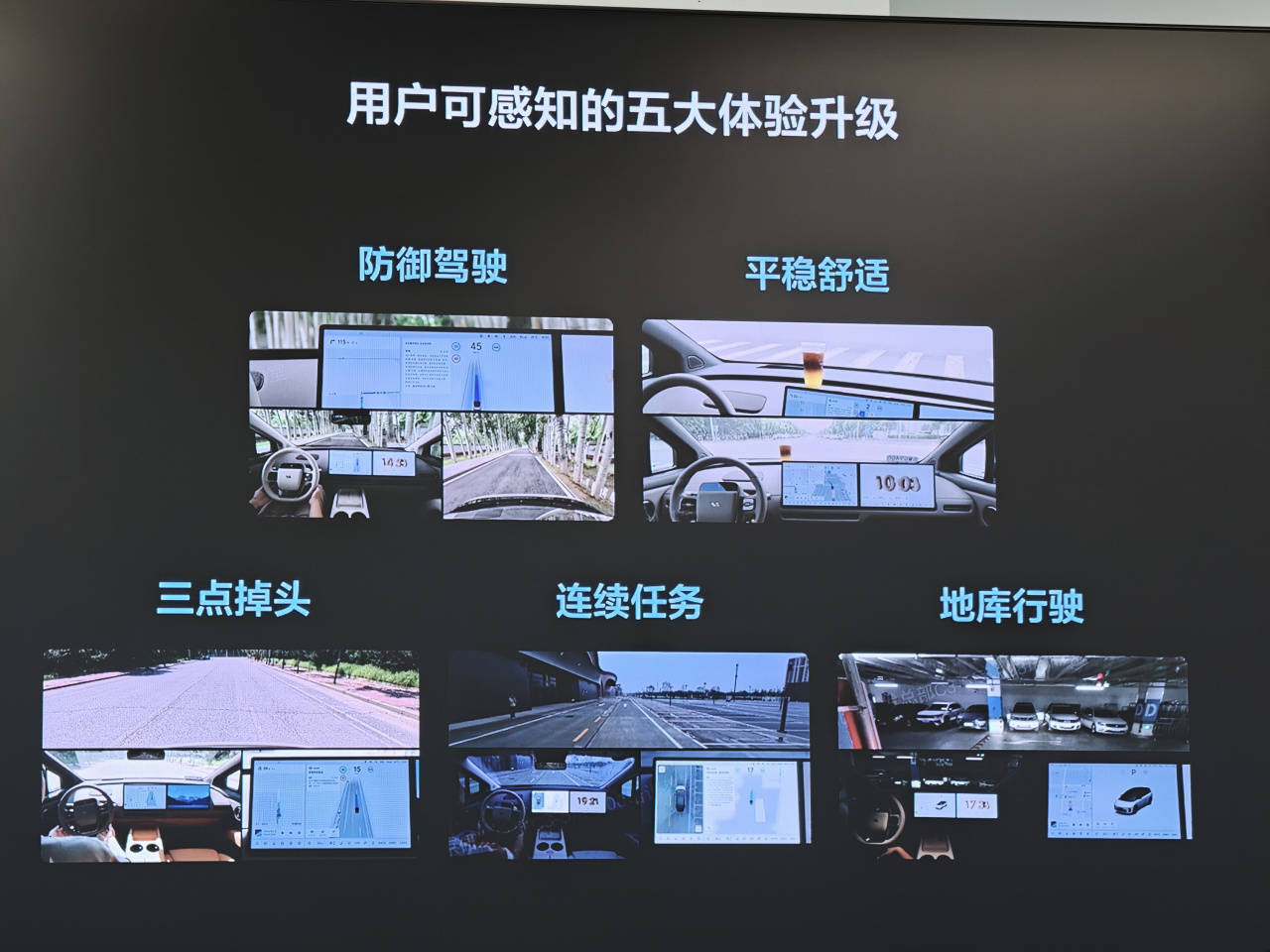
抛开背后的技术实现路径,我们先来聊聊理想VLA司机大模型的实际体验。按照理想的说法,这次VLA大模型上车,在用户感知层面主要有五个方面的升级:1、防御驾驶;2、平稳舒适;3、三点掉头;4、连续任务;5、地库行驶。
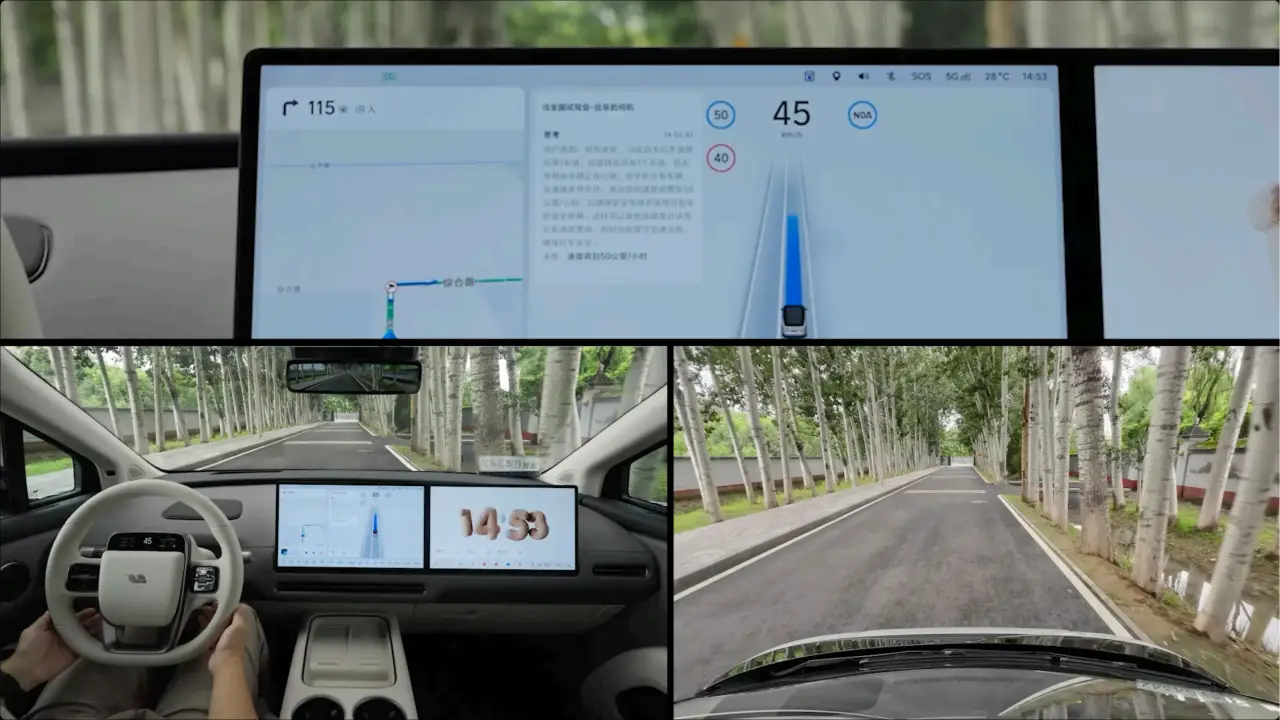
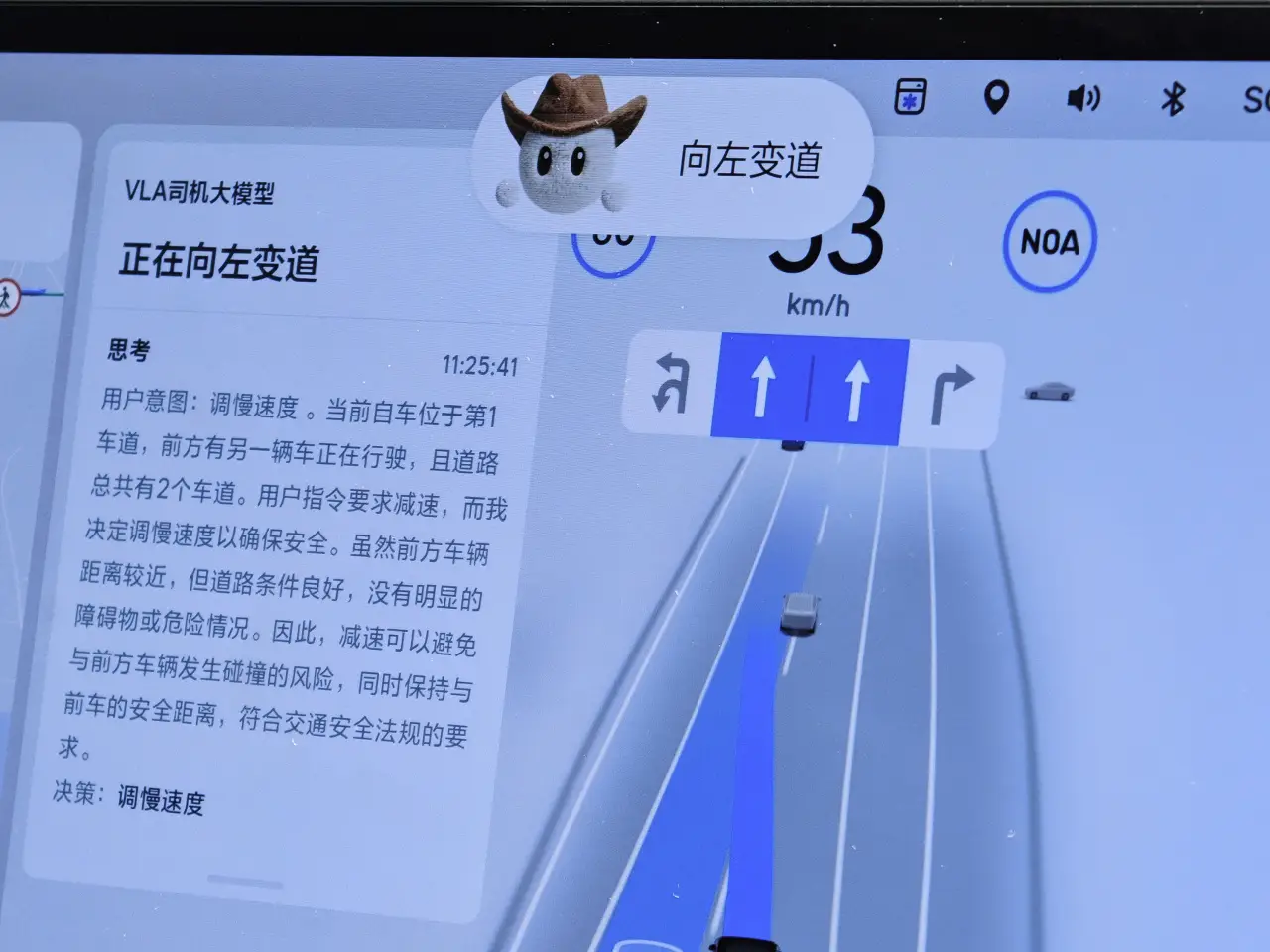
第一个防御驾驶,是说VLA大模型在训练出来以后,会更能理解人类司机在遇到复杂路况的时候更谨慎,而不是端到端模型那种很莽撞的驾驶风格。
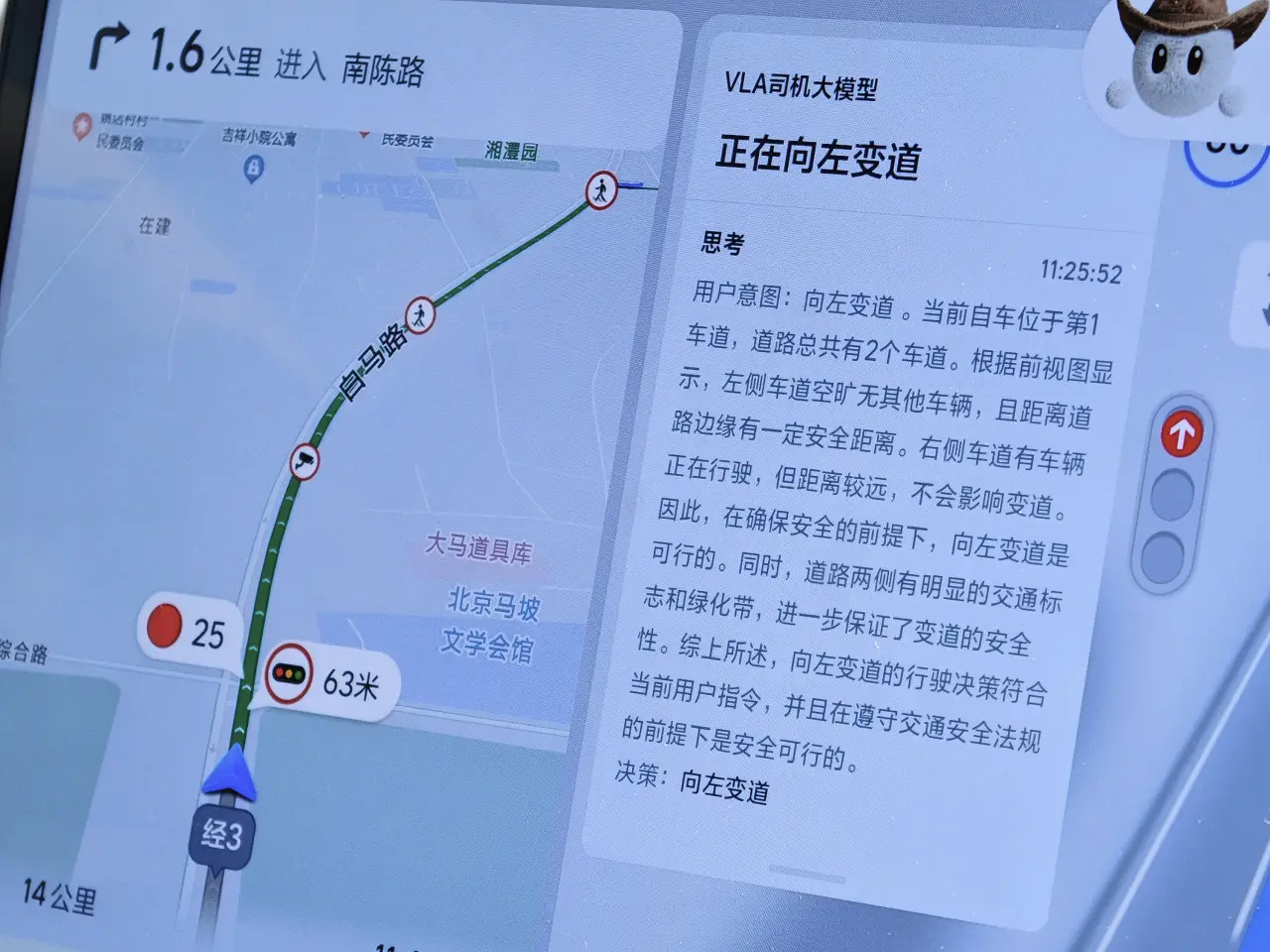
比如在体验过程中,搭载了VLA司机大模型的理想i8遇到T型路口,或者左右两侧暂时有盲区的道路,还有地库窄门时,会进行减速观察,确认安全之后再通过。还有一个比较明显的变化是,在进入左转、右转车道的时机上会更提前一些,而不像端到端那样逼近路口时才迅速变道,也就确保了驾驶的安全性。类似的情况还有,车辆在复杂路口进行博弈的时候,明显会觉得车辆更像人类的驾驶风格,不会特别激进,但又保持了比较好的效率。
第二个是行驶的平稳舒适提升,带来了更好的安心感。理想的智驾工程师透露,VLA大模型带来的一个变化是,对纵向控制会更像人类司机、行车更丝滑,而端到端更多还是横向的控制更多。所以现在端到端+VLM有时候会感觉刹车来得比较急,而VLA上车后就大幅优化舒适性,起步、刹车、转弯都更丝滑,偶尔可能才会出现一次规避旁车的重杀。而且这种平稳舒适也体现在会选择更好的行车路线,比如提前进入右侧车道、超车后变回原来车道、与后车拉开更远的距离,安心感也随之提升。
第三是可以完成三点掉头,也就是在车道任意可以掉头的地方完成掉头、一把不过可以倒车再继续完成掉头的操作。在实际体验中,不仅在四车道的大路上可以完成,在双车道中可以完成,甚至在小路上还会找一个丁字路口完成,能力确实可以。
第四个连续任务的意思是,驾驶者可以语音指令车辆靠边,又或者不按照导航地图的路线,给出一个左转、右转指令,还能够语音变道,甚至你还可以让车辆记住在某段路按照什么速度行驶,可以比限速更快一些,而不用统一调整速度偏移值。并且在你完成这些操作之后,原本的智驾任务是不会中止的,比如你靠边停车之后可以让车辆继续出发;在完成和导航路线不一样的转弯之后,车辆也会继续重新规划路线,并自动继续导航。这样在你进行智驾领航辅助的时候不会因为临停中断而需要重新启动,整个体验更流畅。
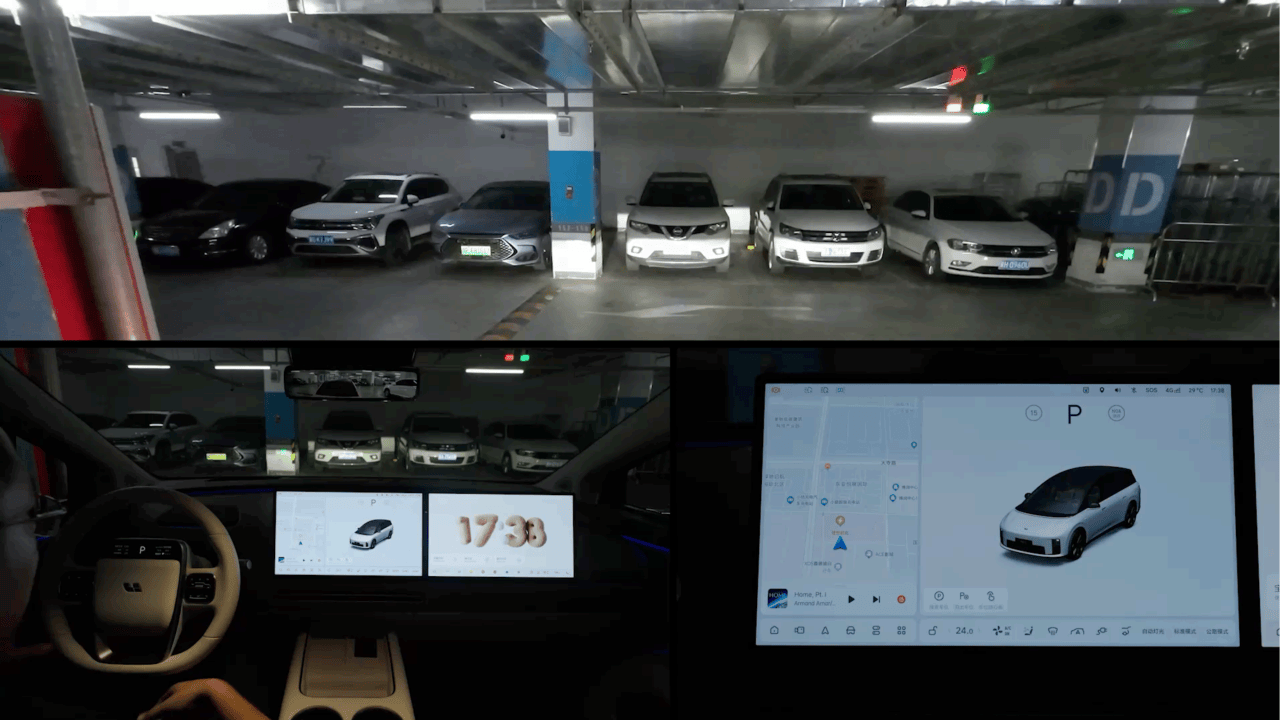
第五个能力是地库行驶。之前的端到端+VLM已经可以完成地库的车位记忆通行,开过一遍就能记住,而现在VLA则实现了如果地库记忆位置不能停车,还可以在地库进行漫游寻找车位,依靠的主要是VLA的视觉-语言能力寻找。在我们的实际体验中,车辆会很准确的识别桩桶、地锁等装置,最后绕了好几圈寻找到车位完成泊车。整个地库的行驶能力超过了我的想象,相当于一个没有预先扫描地库地图的VPD功能。
讲完好的地方,再说说这次遇到的不足。一个比较明显的问题是,语音指令有些时候需要按照标准话术去讲,而不是完全的自然语义。还有在窄路进行三点掉头时的效率还比较慢,尤其是防御驾驶优先的前提下,整个掉头过程可能会造成道路拥堵。
其次是语音操控车辆进行左转右转时,需要预留出足够的时间,否则车辆没有办法及时响应,造成走错车道或者临近变道点激进变道。原因是这一操作相当于让车辆做了一个临时、不可预见的导航规划,所以响应新的导航路线需要一个准备时间。

还有一些小问题包括可能出现“幻觉”,比如语音操作临停,结果停车位置不是很好;还有就是车辆出现过一次听了“变道”语音指令后,试图超越黄色虚线车道线;偶尔也有一些无效变道动作。
以上是这次体验理想VLA司机大模型的实际体验记录,作为VLA司机大模型上车的第一个版本完成度很高,足以给出80分的高分。
02
VLA背后的技术实力
接下来的问题是,理想VLA司机大模型是如何实现这些用户体验的?
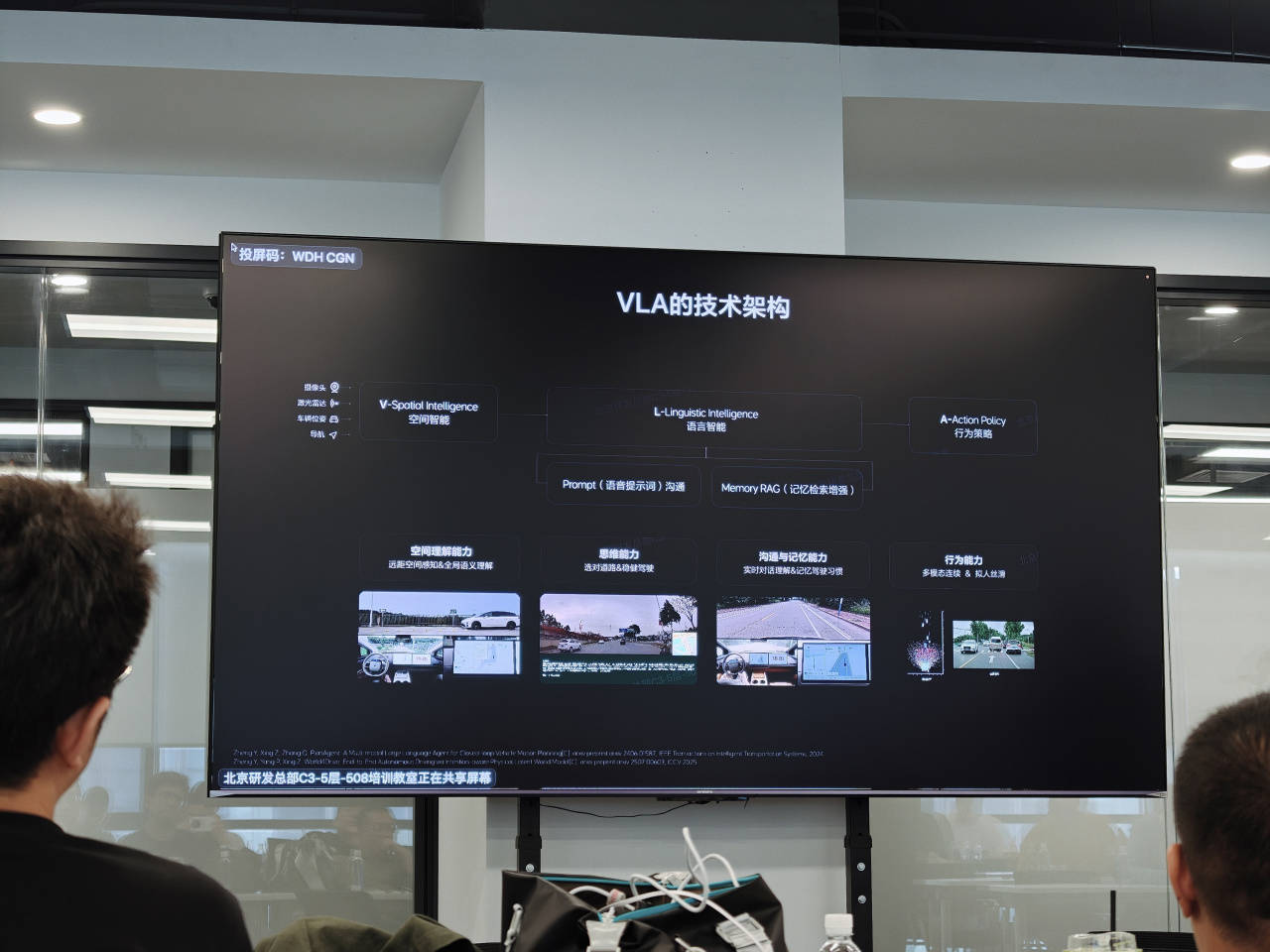
简单来说,理想VLA司机大模型的核心能力就是四个——
1、思维能力:实时推理,推理速度达到10赫兹以上,并呈现思维推理过程。所以在车机上我们可以看到SR界面会有很精简的短思维链推理过程,执行效率很快。

2、沟通能力:用户可以通过语言和模型进行交流,“开快点、开慢点、左转、右转”等基本操作均可实现。这是通过语言能力来实现的——VLA可以通过对语言的理解来执行车辆操控,也就实现了“动口不动手”。
3、记忆能力:通过语言理解记住用户的偏好选择,记住用户之前下发过的指令,存储在云端并直接在云端调用。

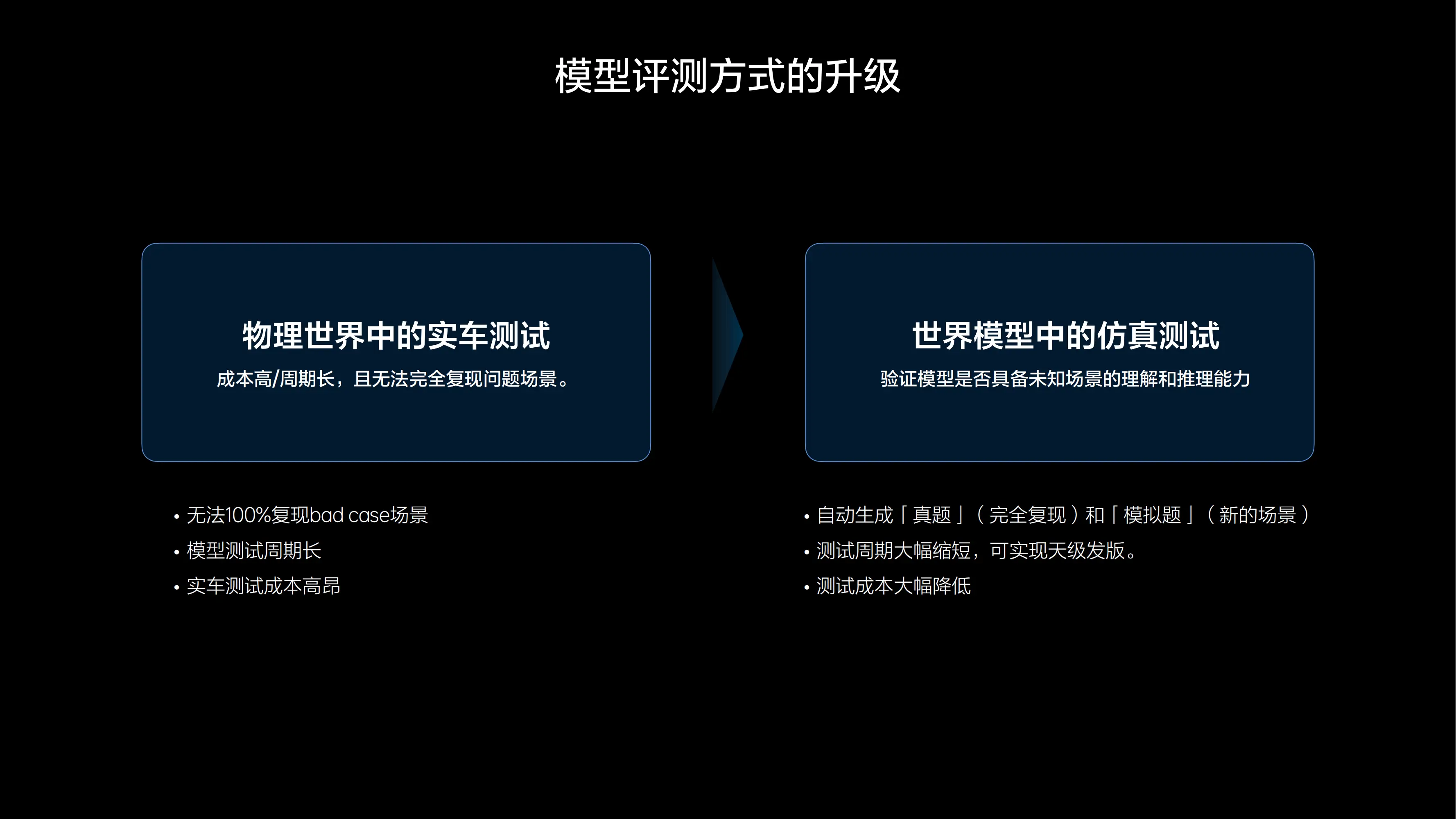
4、自主学习能力:VLA司机大模型在仿真环境里,进行无监督的自我迭代和提升。
在实际过程中,VLA司机大模型就是融合视觉识别和语言理解能力,让汽车有了思考能力,进而才有了上面提到的防御驾驶、平稳舒适、三点掉头等能力。这一点是之前的规则或者端到端架构上无法很好实现的——强规则下可能也能够做到这些能力,但是付出的人力和物力都会更大,而且总是会复现之前的问题,这对于智能驾驶来说迭代效率就没那么高。
那么现在除了理想,还有谁家推出了VLA架构?答案是,没有。
虽然我们也知道,VLA只是人类通向L4、L5自动驾驶终局的一条可选道路之一,别家车企不一定选择VLA做突破,但是VLA暂时被认为会是一条更快出结果的道路,包括现在正火的机器人项目都试图用一个统一的VLA架构去解决所有的操作问题。
那么,理想为什么能率先推出VLA?理想汽车将其总结为四个方面的领先优势——
数据、算法、算力、工程能力。
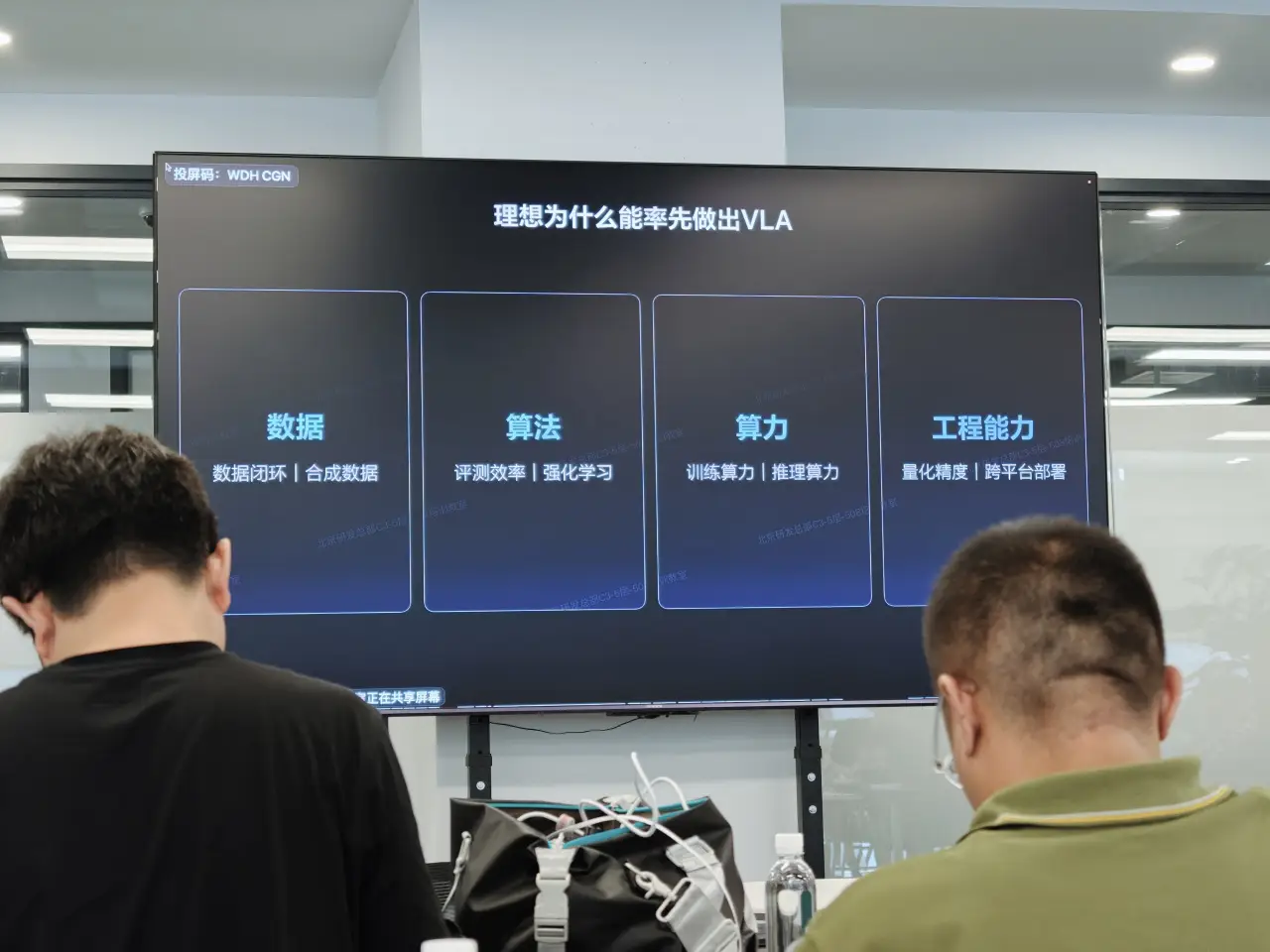
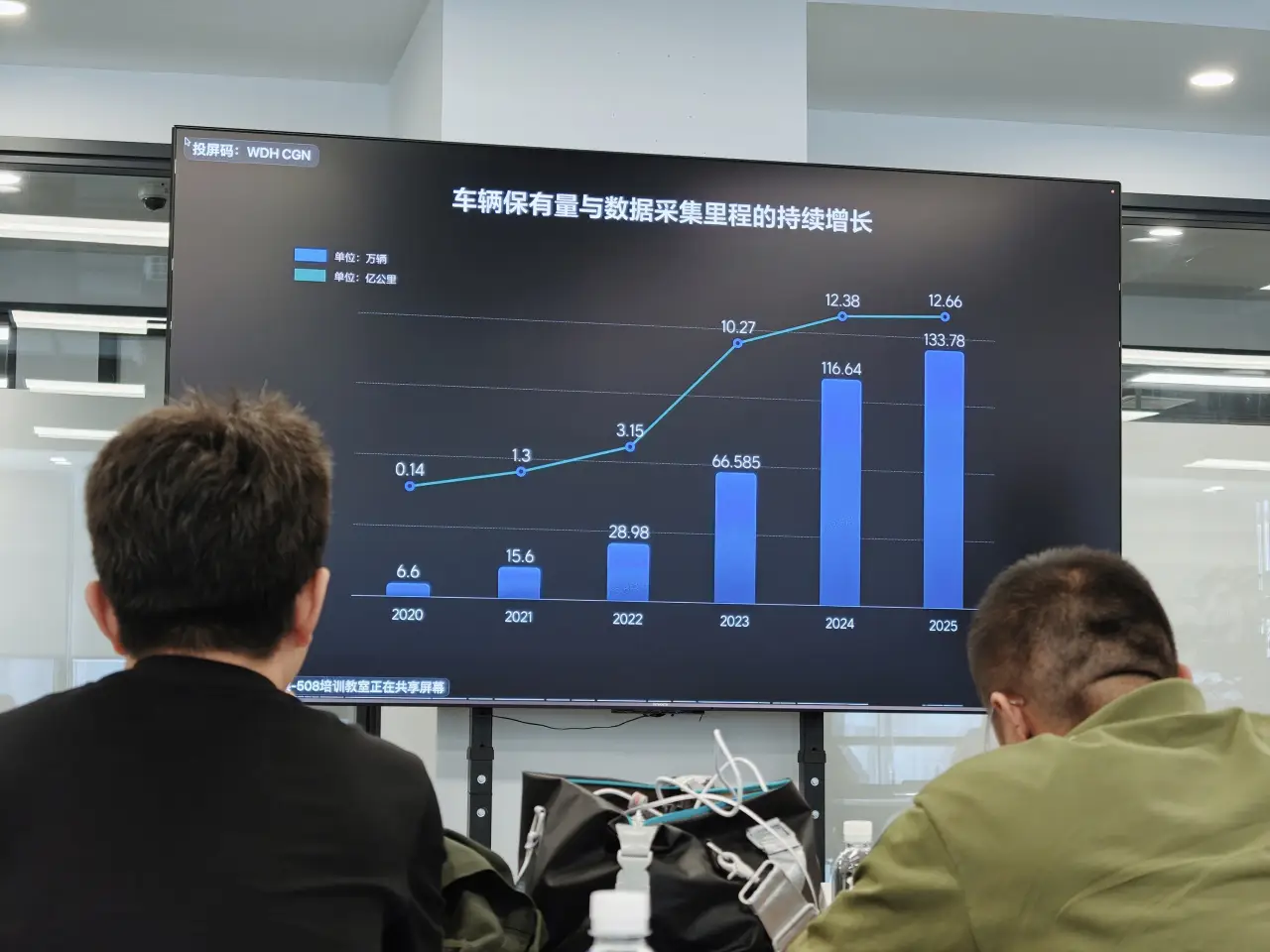
具体这些内容比较复杂,就不在这里展开,简单总结一下就是:理想汽车有12.66亿的数据采集里程,而训练VLA同样用了1000万Clips的数据,但这些数据和之前的训练数据有区别。同时新的训练数据有10%的世界模型合成数据,用来解决一些长尾场景的训练。而在算法上,理想VLA采用先蒸馏出车端模型再进行超级对齐和强化训练的方式,最终训练出一个4B的车端模型。
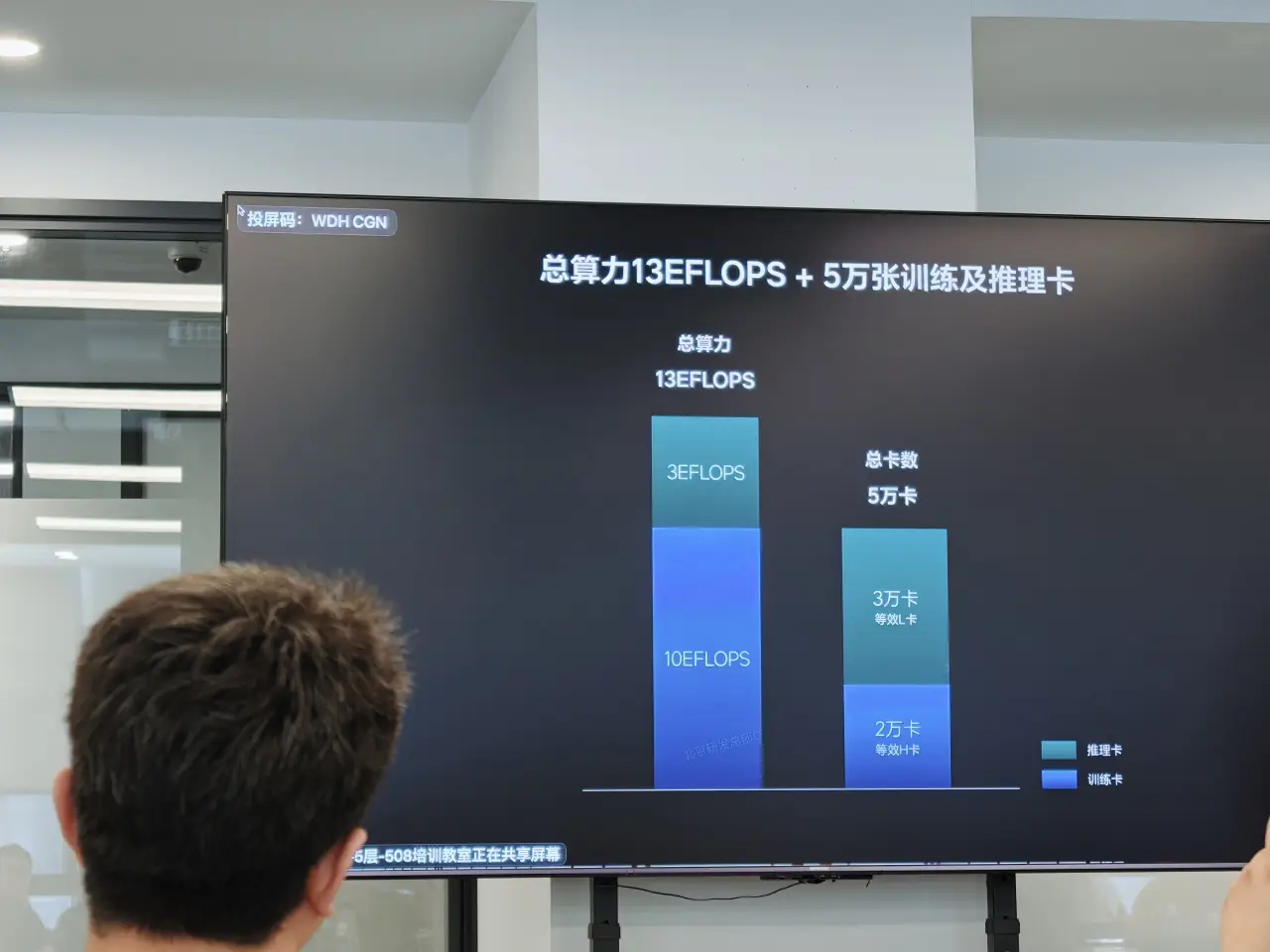
在算力上,理想汽车总算力为13EFLOPS,其中3EFLOPS用于推理,10EFLOPS用于训练。理想汽车认为,“在VLA时代,推理算力更重要,如果没有推理卡,就不能生成仿真训练环境。”
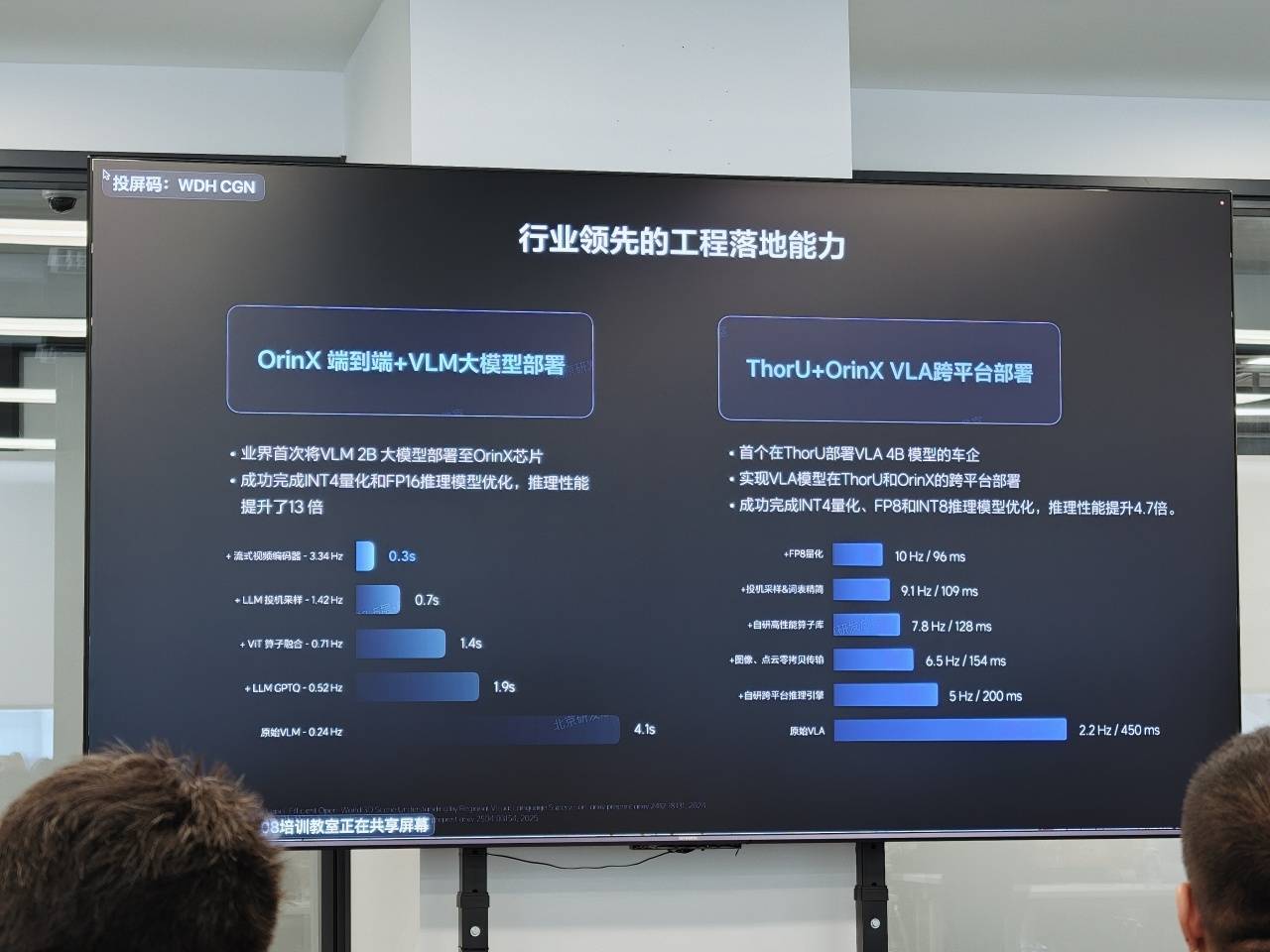
另一个优势是,理想汽车拥有行业领先的工程落地能力,主要体现在量化精度高和跨平台部署能力强。这里面最直观的体现就是理想汽车实现VLA模型在Thor-U和Orin-X的跨平台部署,而不是只有新车才能用。至于量化精度高,你可以理解为推理性能的大幅提升,使得VLA大模型可以达到10赫兹、也就是每秒10次的推理速度,并呈现思维推理过程。
03
VLA的新未来
在体验理想VLA司机大模型之后,一个深刻的感受的是:
VLA是真正高度智能化的模型架构,其应用场景和迭代速度或许会超乎想象。

比如之前很多企业都在做L4级别的Robotaxi,又是激光雷达又是高算力芯片,但是今年我们看到特斯拉直接用纯视觉传感器+FSD就可以完成Robotaxi的部署。这就证明了在智能辅助驾驶系统迈向端到端的下一阶段以后,可以更快速地向L4进发。
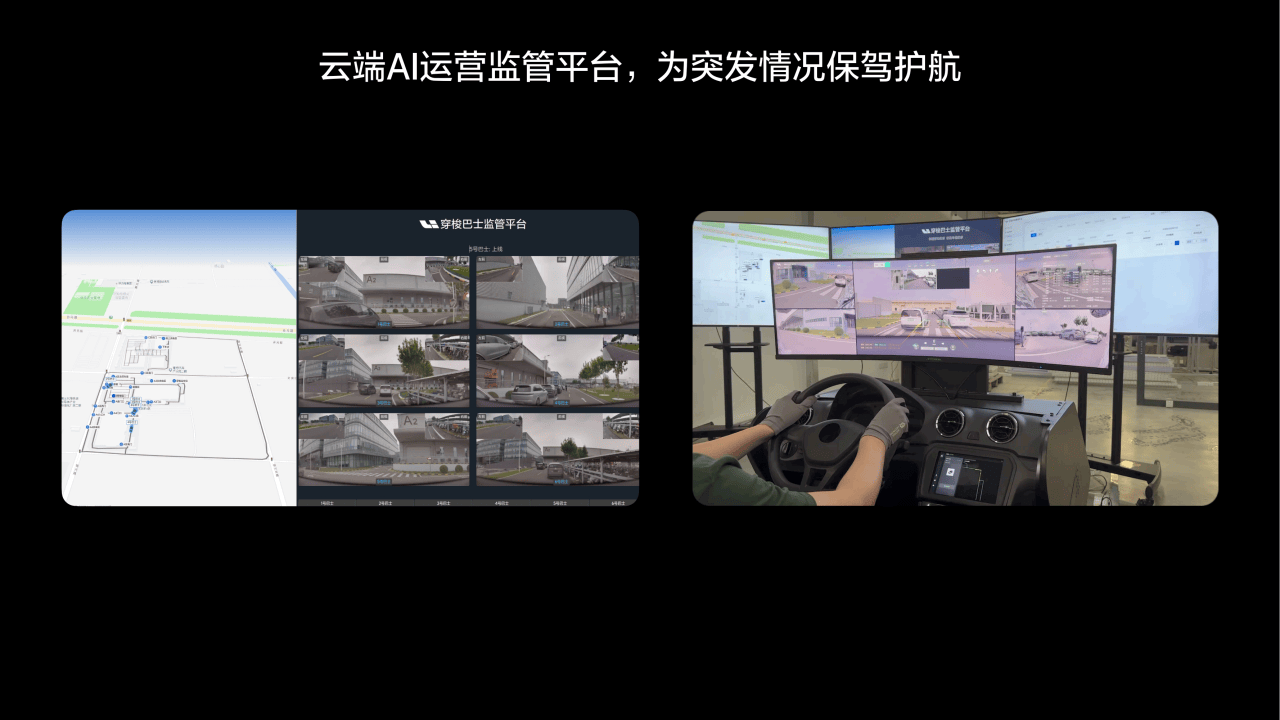
同样,在体验理想VLA司机大模型的时候,理想汽车也给了我们一个“One more thing”,就是理想汽车的无人驾驶穿梭巴士。这些穿梭巴士就是理想MEGA Home做了一些专门的调试,主要是对理想汽车园区做了扫描和打点,然后仅仅是利用VLA司机大模型能力就可以让MEGA Home成为无人驾驶的穿梭巴士,完成园区内的漫游。

实际体验中,你可以召唤穿梭巴士接人,然后去往星巴克拿咖啡,再让它开到C1大楼的地下车库送你去开会,整个流程都非常丝滑。而且这些操作基本都可以通过语音来控制,也算是一个无人穿梭巴士的“交互新范式”。所以,理想的穿梭巴士完全就是复用了VLA司机大模型的能力,除了园区没有导航、必须实现打点之外,几乎没有任何改装成本。
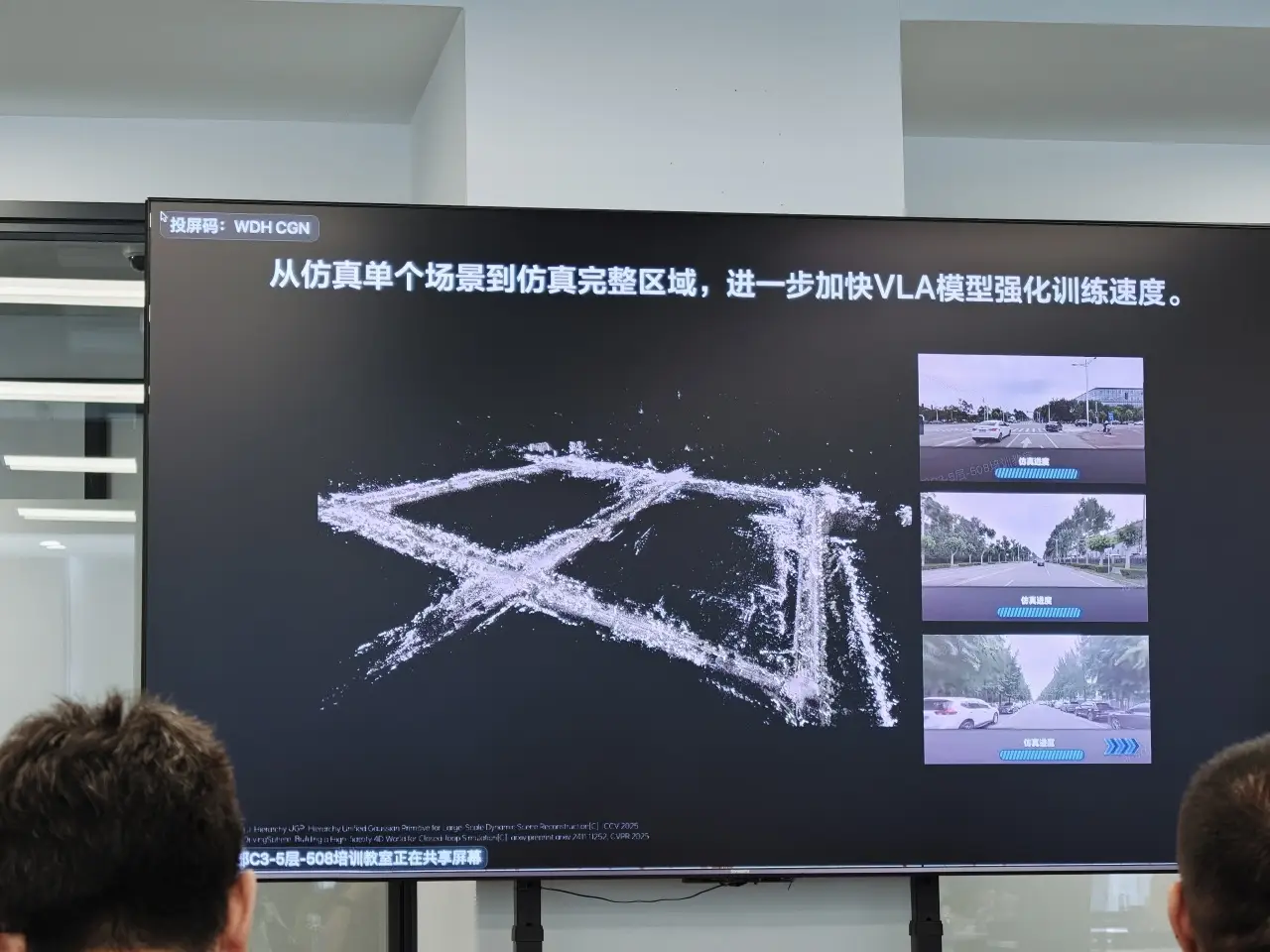
理想汽车方面则进一步表示,园区穿梭巴士相当于从仿真单个场景变为仿真完整区域,会进一步加快VLA强化训练速度。
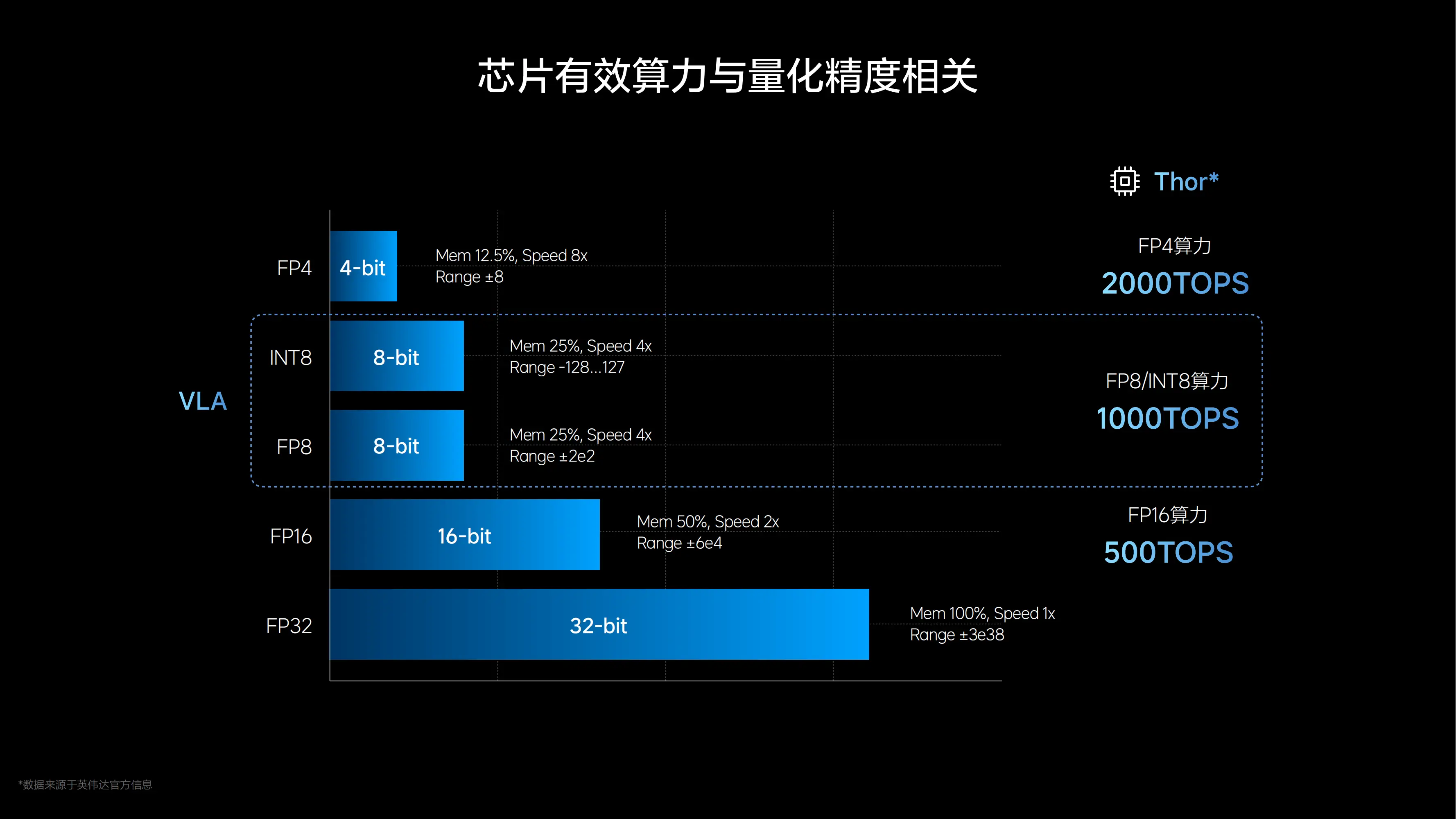
另一方面,尽管VLA司机大模型的效率还受限于算力,但是从长远来看,通过对VLA模型精度的变化,比如从目前采用的INT8与FP8混合精度推理,变为FP4精度推理,预计未来算力可实现翻倍,为VLA模型释放更大的算力空间。
所以,理想汽车才有底气说:VLA的下限是端到端+VLM的上限,而VLA的上限,则是让人遐想的未来。这也将会让理想i8的口碑和产品价值迎来一次类似于当年问界新M7的反转时刻。
(END)

精彩瞬间:大发黄金版app下载【AM68·CC】【寇―5902-869—】【HF77·VIP】【域名手动在浏览器翻开】【携手大发】 【大发购彩】【快3计划】【亏损包赔】【精准计划】
精彩瞬间:大发黄金版app下载【AM68·CC】【寇―5902-869—】【HF77·VIP】【域名手动在浏览器翻开】【携手大发】 【大发购彩】【快3计划】【亏损包赔】【精准计划】

这几年中国新势力品牌高端和豪华的路子越走越远,早已不满足于40到50万这个价位,目标已经开始锁定80万甚至百万级的价位,包括尊界S800、仰望U7、蔚来ET9等等都打算在这个价位上分得一杯羹,但和这个级别的标杆车型奔驰S级相比,在产品力方面其实还是有很大差距的。

导师带赚钱一对一带盈利【—DF992·CC—】【寇―3281-570—】【—DF950·CC—】【导师带赚计划】【导师一对一带赚】【大发购彩网】【亏损包赔】【快三计划】规律【回血】
精彩瞬间:大发黄金版app下载【AM68·CC】【寇―5902-869—】【HF77·VIP】【域名手动在浏览器翻开】【携手大发】 【大发购彩】【快3计划】【亏损包赔】【精准计划】
精彩瞬间:大发黄金版app下载【AM68·CC】【寇―5902-869—】【HF77·VIP】【域名手动在浏览器翻开】【携手大发】 【大发购彩】【快3计划】【亏损包赔】【精准计划】
精彩瞬间:大发黄金版app下载【AM68·CC】【寇―5902-869—】【HF77·VIP】【域名手动在浏览器翻开】【携手大发】 【大发购彩】【快3计划】【亏损包赔】【精准计划】

精彩瞬间:大发大小双单导师带赚【AM68·CC】【寇―5902-869—】【HF77·VIP】【域名手动在浏览器翻开】【携手大发】 【大发购彩】【快3计划】【亏损包赔】【精准计划】
精彩瞬间:大发黄金版app下载【AM68·CC】【寇―5902-869—】【HF77·VIP】【域名手动在浏览器翻开】【携手大发】 【大发购彩】【快3计划】【亏损包赔】【精准计划】
精彩瞬间:大发黄金版app下载【AM68·CC】【寇―5902-869—】【HF77·VIP】【域名手动在浏览器翻开】【携手大发】 【大发购彩】【快3计划】【亏损包赔】【精准计划】
精彩瞬间:大发黄金版app下载【AM68·CC】【寇―5902-869—】【HF77·VIP】【域名手动在浏览器翻开】【携手大发】 【大发购彩】【快3计划】【亏损包赔】【精准计划】

精彩瞬间:大发-对一导师带赚计划【AM68·CC】【寇―5902-869—】【HF77·VIP】【域名手动在浏览器翻开】【携手大发】 【大发购彩】【快3计划】【亏损包赔】【精准计划

赛里木湖体验全新问界M7的辅助驾驶,华为ADS 4表现如何?
精彩瞬间:大发-对一导师带赚计划【AM68·CC】【寇―5902-869—】【HF77·VIP】【域名手动在浏览器翻开】【携手大发】 【大发购彩】【快3计划】【亏损包赔】【精准计划
精彩瞬间:大发-对一导师带赚计划【AM68·CC】【寇―5902-869—】【HF77·VIP】【域名手动在浏览器翻开】【携手大发】 【大发购彩】【快3计划】【亏损包赔】【精准计划
精彩瞬间:大发黄金版app下载【AM68·CC】【寇―5902-869—】【HF77·VIP】【域名手动在浏览器翻开】【携手大发】 【大发购彩】【快3计划】【亏损包赔】【精准计划】

快3大小单双导师计划【誷纸:DF965.CC】【誷纸:DF970.cc】【大发购彩网】【亏损包赔】【精准计划】【导师带赚钱】【信誉平台】【万人聊天室】【大小单双】【计划群】[QGH
精彩瞬间:大发黄金版app下载【AM68·CC】【寇―5902-869—】【HF77·VIP】【域名手动在浏览器翻开】【携手大发】 【大发购彩】【快3计划】【亏损包赔】【精准计划】
精彩瞬间:大发-对一导师带赚计划【AM68·CC】【寇―5902-869—】【HF77·VIP】【域名手动在浏览器翻开】【携手大发】 【大发购彩】【快3计划】【亏损包赔】【精准计划
精彩瞬间:大发黄金版app下载【AM68·CC】【寇―5902-869—】【HF77·VIP】【域名手动在浏览器翻开】【携手大发】 【大发购彩】【快3计划】【亏损包赔】【精准计划】






























 京公网安备 11010102004670号
京公网安备 11010102004670号