2024年高考的前一天,小米进行了OTA。而高考第一天的语文作文题目,包含了一条“随着互联网的普及、人工智能的应用,越来越多的问题能很快得到答案。那么,我们的问题是否会越来越少?”。刚好和小米的这次OTA比较贴合,也是与人工智能应用相关,但不是人类设问、AI回答。而是,AI给人类找出合适的智能驾驶解决方案(答案)。
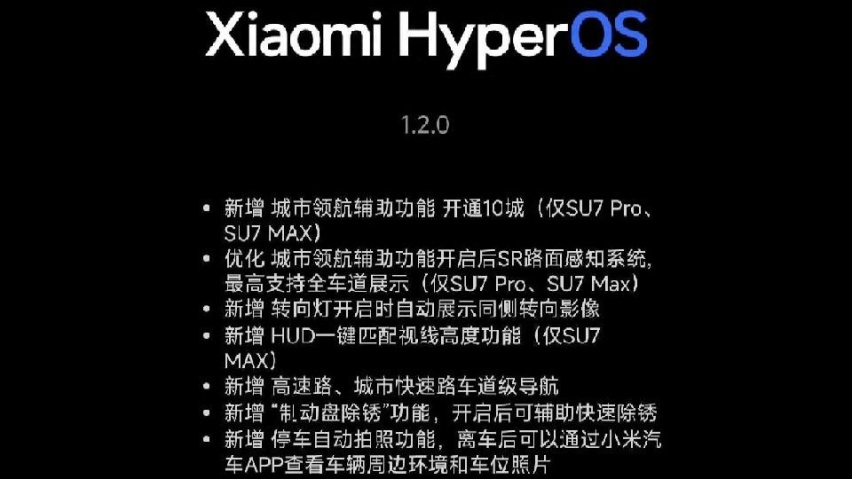
小米SU7的OTA 1.2.0没有跳票,成功在约定的时间推送给了车主们,而在6月6日当天,也已经有不少车主OTA完成。这次OTA的功能,包括了城区NOA开通十城、驻车空间推出“小憩模式”、支持导入更多米家设备。
最核心的功能,就是十个城市的城区NOA功能。但这次OTA后想使用这个功能,还需要满足“智能驾驶安全里程”条件的用户才可以优先使用,而累计达到 1000km智驾里程的用户,统计时间截至2024年5月31日00:00。
OTA之后的小米,会和华为越来越近么?
提出这个疑问的出发点,是,小米这次的OTA主要补齐了城区NOA这个功能,也是未来几年内国内辅助驾驶市场必须卷的一个领域。而华为的ADS在今年内已经有计划要推出ADS 3.0版本,这个版本主要针对提升的也是城区NOA的性能,可以预见的是这个版本将会更加拟人化的去处理城市工况的辅助驾驶。
那,这次更新之后是不是可以超了理想,更接近华为的体验了?

对于第一次造车的品牌,第一次推送的城区NOA功能,我们不应该抱有太大期待,这才是一个合理的预期值。这种技术往往需要高频次的迭代更新之后,才会趋于成熟。这次OTA更新之后,相关测试的视频没有被及时放出,原因是需要一个1000km智能辅助驾驶的积累,才能出发城区NOA功能的使用。
估计大部分用户被上面提到的条件所限制,延后了一段时间才能使用。不过我们其实也可以通过之前的直播视频,以及这套技术背后的底层逻辑,来分析一下这个初代版本的城区NOA,够不够好用,目前是处于一个什么级别?
技术层面,可以进入第一梯队。

在技术方面,小米汽车的智驾体系带来了一些新东西,或者说在传统技术层面做了一定的改变。发布会上介绍过,这套智能驾驶软件底层算法,用的是变焦BEV技术和超分辨率OCC占用网络以及道路大模型做出来的。
传统的BEV网络,能提供车辆周围的二维鸟瞰图,但没有高度信息,所以不能提供三维建模。一般情况下,会选择匹配其他网络,例如华为ADS 2.0选了GOD网络来做三维建模的工作;小米选择了用OCC网络,来做三维建模的工作。但后来,华为在ADS 3.0中采用了更为先进的GOD网络来解决这个问题,弃用了BEV网络。
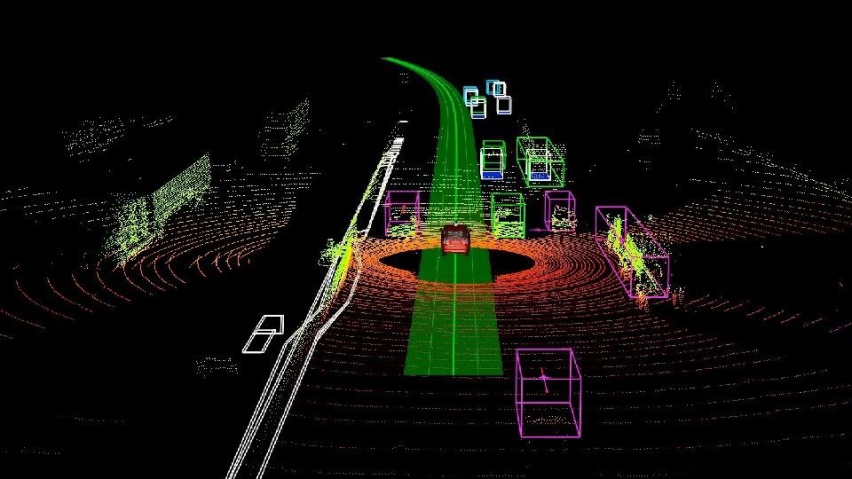
然后小米的变焦BEV技术,主要提升了不同场景下对最小识别精度的提升,精度大概在0.05米左右;用在泊车域和城区NOA这种复杂工况下的时候,会相对来说,比传统BEV好用一些(也就是华为ADS 2.0的传统BEV网络)。
再之后的OCC网络,意思其实和GOD一样,也是生成三维空间用的,把感知到的信息做成三维建模。之所以在初期普遍会选择BEV+OCC/GOD网络的组合使用,是在OCC/GOD网络没有达到成熟之前,确保感知精度、准确性、车辆安全性等多个角度考量的,简言之单靠OCC/GOD满足不了这些条件。
现阶段,小米的智能驾驶在技术层面,其实做到了与华为ADS 2.0齐平的基础。

看完底层技术逻辑之后,其实已经做到了第一梯队的水准。那么,在使用效果端理论上很难做不好,而我们该注意的,是这套系统的上限在哪里,和初期的城区NOA效果能达到什么样的使用水平。
这套辅助驾驶软件算法能实现的效果,从前期的测试视频、直播中我们大概也能摸清楚一些,先说测试中明显做的很好的效果。在复杂路口的工况下,抉择和操作都相对来说是比较快,而且果断的,这是做好城区NOA的一个大前提。
然后,说具体工况下的使用情况。

在十字路口的让行上,行人、电动车优先级最高,基本在直行、转弯的时候,遇到正常通行/突然窜如的行人或电动车的时候,小米SU7在90%的情况下都会做出刹停等待的操作,并且确认前方没有任何障碍物时候才会加速通行(但这个过程可能需要几秒钟的时间来做判断),相对来说,是一个比较保守的通行策略。
还有在面对无序车辆在十字路口拥堵的情况下,小米SU7也会通过跟随规划路径按序行驶的形式来通过拥堵路口,整个过程没有被驾驶员接管,这是一个不错的体验。但,整个过程的操作执行,会有一些“犹豫”和延迟。

这个工况下,小结一个点,小米SU7的城区NOA在遇到复杂路口、多车并行通过、无序的情况下的这种“博弈”,是一个绝对温和的策略,不激进的去抢车道,而是在低速行驶等待机会出现。在下面的工况,也出现了同样的操作。
左转路口,转完后等待接下来的直行操作的时候,会遇到一个情况,让行同路口右转弯车型先行通过;同时,左转弯路口车辆在转弯后,跨越虚线车道线行驶进入直行道。在这个场景下的决策,有一些不够拟人,这也暴露了小米这套智能驾驶系统的一个状态,大多数情况下,是处于非常保守的状态。以上工况,如果是驾驶员亲自开的话,那么,左转弯后面对三条车道,会优先选择无车/车辆较少的车道通行,而非是等待右转弯车型先行后再通行,可以做到同步通行。

虽然部分工况下,可以顺利执行操作,并且决策和规划的行车路径,大部分都是比较合理的状态。但,有一些工况其实还是需要进一步加强,例如,跟车距离(容易被插队)、刹停时候的姿态、起步时候的快速响应等,都是一些比较考验细节的优化能力。
整体来看小米SU7的智能驾驶部分,大体的框架没有任何问题,逻辑跑的通,只是欠缺细节优化的问题,估计会在后续的OTA中去逐步优化。
然后期待一下它的后续更新,分为几个阶段,持续用BEV+OCC网络的方案,用这套逻辑把细节处理好,至少解决跟车距离远近问题(或者是可以调节的一个设置)以及跨车道行驶的逻辑打通;然后,后续的大版本更新,肯定也会弃用BEV网络,在能把2D信息转化为3D建模的网络出现之后,BEV就真的是个累赘般的存在了(类似于ADS 2.0到3.0的路子)。
这套智能驾驶系统,已经差不多追平了华为ADS 2.0版本的使用感受,起码在底层逻辑上这个基础做的挺好的,逻辑清晰、操作速度快这些是优点,但细节上的处理确实没有做到特别好的精度,和感知设备无关,更多的是算法优化。

当兵马俑“活”起来:HTC VIVE用XR技术打开千年文明的新入口

近日,业内传言智能清洁领域明星企业追觅科技正悄然布局电视市场。若消息坐实,这家以扫地机器人、洗地机等产品迅速崛起的新锐力量,其产品版图将首次触及“客厅中心”——电视这一大屏终端。

“国补+高温”,让今年的空调市场异常火爆,行业里也混战一片:美的、格力、海尔三足鼎立的大格局未破,不过海尔、格力的拉锯让座次争夺暗流汹涌;小米凭借强大的营销拉力凶猛冲量,海信、TCL试图以新风标签撕开市场,奥克斯则借上市IPO谋求东山再起,众多中小品牌在低价带寸土必争……空调大争......

骁龙8Elite手机怎么选?六边形战士红魔10Pro+玩家必看!

当笔记本开始“喷香水”:华硕a豆联名娇兰:科技与优雅完美邂逅

内衣、袜子、外衣分开洗的精致生活,不再是奢望。今年以来,随着消费者健康意识增强,分区洗护需求迎来爆发式增长。奥维云网数据显示,多筒洗衣机线上渗透率从3月的3.2%飙升至5月的9.5%,成为行业增长最快的细分赛道。

当香氛漫过键盘:华硕a豆×娇兰闪光礼盒,重新定义数码产品的“情绪价值”

在洗衣机市场的激烈竞争中,三筒洗衣机正逐渐崭露头角,成为众多消费者关注的焦点。钉科技注意到,近日,海尔和美的两大巨头纷纷布局 850mm 标准尺寸的三筒洗衣机,旨在满足消费者对于空间利用和多样化洗涤需求的追求。

日前,威世科技宣布,推出两款全新IHDM汽车级直插型扁线电感器---IHDM-1107BBEV-2A和IHDM-1107BBEV-3A,这些器件采用1107封装尺寸,软饱和电流可达422 A。

近期,智能辅助驾驶系统安全事故频发、大规模实测表现堪忧,叠加监管部门接连划定安全红线,其安全可靠性正遭遇前所未有的公众信任危机。7月23日,国家公安机关强调,将协同有关部门进一步加强“智能驾驶”规范管理,标志着行业监管从“事后整改”转向“事前预防”的国家级体系化治理。

小米智能摄像机4C 3.5K,智能看护实力派
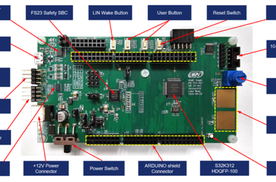
今天大联大控股宣布,其旗下世平推出基于恩智浦(NXP)S32K312 MCU、FS2303B安全电源管理芯片以及TJA1443ATK高速CAN收发器和TJA1021TK高速LIN收发器的汽车通用评估板方案。

雷柏V700DIY-98体验!客制化键盘天花板?颜值、手感、布局全在线

散热逆天!奥睿科SOC冰甲固态硬盘体验:7450MBs无压力

200出头的Mac mini M4扩展坞底座奥睿科MiniDock,不愧是价格屠夫

安踏、斐乐跑鞋在唯品会持续圈粉,不只是因为打折

艾迈斯欧司朗宣布,使用新一代OSTAR™ Projection Power LED为紧凑型投影系统乃至未来的抬头显示器(HUD)设定了LED技术创新标准。

预算党必看!金百达KP270 PCIe4.0 NVMe 2TB SSD性价比高到离谱

运动鞋“攻陷”写字楼,唯品会却还能打折?

百年日立挥别白色家电,日本制造神话在亚洲新兴企业的冲击下正加速退场。钉科技注意到,日立考虑出售其日本国内白色家电业务的消息震动业界。据日经中文网最新消息,这家百年企业拟将冰箱、洗衣机等业务剥离,交易估值或达1000亿至数千亿日元。三星电子等企业已表现出收购意向。































 京公网安备 11010102004670号
京公网安备 11010102004670号