Hello大家好!
对于每天需要长时间开车上下班的人来说,漫长的通勤路可以说是非常痛苦的,拥堵的路况不仅毫无驾驶乐趣可言,还得时刻准备和邻车斗智斗勇。
但如果此时,你的车突然掌握了高阶辅助驾驶驾驶的奥义,并能够为你分担一把压力时,你是否会为此感到解脱呢?

当然,高阶辅助驾驶目前还处在不断打磨的阶段,不过大疆、理想、小鹏却不愿再做等待,并率先推出了“通勤模式”,旨在帮助打工人缓解通勤烦恼。
什么是“通勤模式”?
就和它的名字一样,“通勤模式”的作用,就是让车子在L2+的功能范畴内,帮助车主开车上下班,从而减缓大家在通勤路上的疲劳感。
而想要实现“通勤模式”,则需要车主像老师教学生一样,先在固定的上下班路径上开一段时间,让车子逐渐熟悉周边的场景、学习车主的驾驶习惯。

在熟悉与学习完成后,“通勤模式”就能在通勤路上实现诸如智能跟车、智能变道、红绿灯转向等操作,厉害一点的甚至还能在最后帮你停好车。
虽然还不能像自动驾驶一样让你真正脱手操作,但“通勤模式”足够帮你省去不少频繁加减速、保持车距、加塞变道的操作,并且训练得越久,它的操作也会越成熟。
实现“通勤模式”并不简单
听起来似乎很简单,但“通勤模式”可远不是某些人认为的“记忆行车”那么简单,如果想要让一套“通勤模式”真正好用,就必须要具备高感知及认知能力。
“看得见”的感知
“通勤模式”开启后,车子首先要能“看得见”,这需要感知模型从摄像头、激光雷达处获取数据,并生成能够描述真实场景的BEV网络。
BEV是英语“鸟瞰图”的缩写。对于辅助驾驶和自动驾驶来说,BEV是一种主流的映射真实世界场景的视图形式。在BEV网络下,辅助驾驶和自动驾驶能够获得更直观的周边视角。
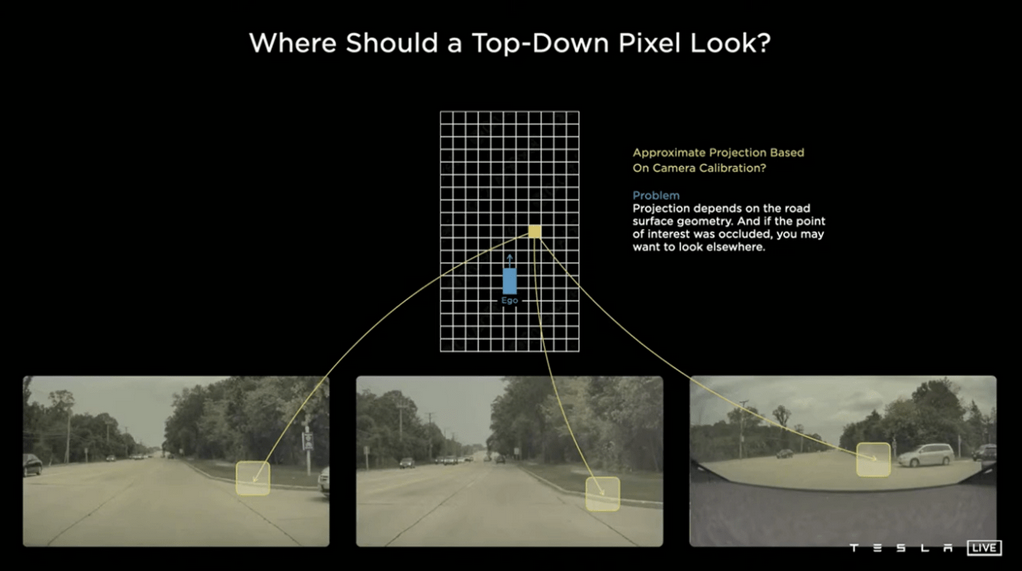
这一过程存在一个难点,就是如何把不同种类传感器的特征进行融合,并保证精确。对此,特斯拉、蔚小理等车企普遍使用BEV+Transformer的方式,先通过视觉神经网络的Backbone识别图片特征,再借助Transformer将各个图像的特征进行融合。
Backbone的直译是“主干”,就像一棵大树存在主干和枝干一样,Backbone的作用就是作为数据特征识别的第一步,先确定数据特征的大致种类,再将其分配给对应种类的枝干做更进一步的特征识别,从而一步步细化数据特征,最后完成精准识别。
Transformer是近几年在自动驾驶领域颇为流行的神经网络模型,其能够借助自注意力机制去挖掘不同数据中特征的相关性,从而对多模态数据进行准确融合、映射出更真实的世界。
“看得懂”的感知
这还只是能“看得见”而已,如果想让“通勤模式”正常运行,就得让它能“看得懂”周围的场景,明白什么是红绿灯,什么是车道线,从而判断出可达空间,继而规划路径。

对此,车端又会搭载一系列的感知模型,它们会负责理解感知数据中的语义信息,比如路牌上的限速、左右转车道的指引线等等,帮助后续规控策略的输出。
而在这一过程中,一些特殊的感知数据还会被上传到云端,比如感知系统发现了一种当前车端模型无法准确识别的障碍物,或者驾驶者在正常规划的行驶路径中莫名干预了,这些数据会在到达云端后被人工或自动标注的形式,标注数据特征。

之后,这些具备特征的数据又会被加入数据集,训练对应的感知模型,而新模型在通过验证后,又会以OTA的方式回传到车端,由此让车子的感知能力越来越强。
“拟人化”的认知
如果规控策略太过机械生硬,那么给到驾驶者和乘客的乘坐感受就会非常糟糕。这种时候,就需要“通勤模式”能够学习驾驶者的驾驶方式。
通过重复学习,车端的驾驶数据也会传递至云端,并在特征标注后交由认知模型进行训练,最终再经过仿真验证回传至车端,得到驾驶风格更自然、更接近真人驾驶的效果。

可以看出,“通勤模式”的内核,实际就是将原本的城市域高阶辅助驾驶的实现范围,从全国所有城市道路缩小到了驾驶者的通勤道路。
然而,“通勤模式”并不能等于后者,除使用范围受限之外,驾驶者还需要主动训练“通勤模式”,也就是尽量多的沿着固定路线驾驶,直到“通勤模式”完全训练成熟为止。
“通勤模式”能帮到消费者吗?
基础原理大致如此,对于多数消费者,尤其是通勤距离长、时间久的消费者,“通勤模式”虽然存在一些缺点,但整体依旧是非常有使用价值的。
优点
不同于任何一套辅助驾驶产品,“通勤模式”是兼容高速、快速路和城市道路的,而目前的高阶辅助驾驶普遍还被区分为高速域和城市域两种。

在这之中,高速域产品已经投入使用了,而城市域产品由于国内城市道路里程大、场景复杂、变量多等问题还处在“期货”阶段。也就是说,当前只有“通勤模式”能带给你覆盖全场景的高阶辅助驾驶的体验。
另外,针对自己最需要的场景进行强化训练,也能让训练出的“通勤模式”更贴合自己的需求,而换做其他高速域与城市域辅助驾驶系统,则全看泛化性做得如何了。
不足
首先,如果你的通勤场景恰好非常极端、非常复杂,那可能真的需要非常长的训练时间,并且最终的使用效果也不能完全保证。

并且,“通勤模式”依旧处于L2+范围内,即使它能够通过训练达到无限接近于脱手驾驶的能力,驾驶者依旧需要时刻关心前方路况,而且哪怕“通勤模式”本身恪守交通法规,在实际驾驶过程中,也经常会发生邻车不遵守交规的情况,我们就得时刻做好接手准备。
车企为何集体加码“通勤模式”?
“通勤模式”之所以被越来越多的车企加码,本质上是为了越过当前城市域高阶辅助驾驶落地难、落地慢的困境,让消费者更快体验到新技术的同时,“以点带面”加速整个高阶辅助驾驶技术的迭代。
而城市域高阶辅助驾驶技术之所以落地难、落地满,主要问题则是出在了地图和数据这两大“拦路虎”上。
地图
先说地图。高阶辅助驾驶要运行,就必须需要一份导航地图来提供一定的先验信息。而在前两年,大家普遍都将目标放到了高精地图身上。

高精地图具备的信息量是巨大的,它能够配合高精定位,提供厘米级的定位、精确的驾驶辅助信息和语义信息,相当于直接给高阶辅助驾驶打开了“上帝视角”。
但是,高精地图的绘制和鲜度保持成本是极高的,并且考虑到政策管控因素,又会让很多城市无法实现覆盖,让依赖高精地图的城市域辅助驾驶产品无法落地。
数据
而如果不依赖高精地图、选择提升自身的感知能力,则又要面对技术层面最大的困难,数据。
如今的车企已经默认了“数据驱动”路线,即在大算力加持下,借助海量数据训练大模型,提升高阶辅助驾驶、乃至自动驾驶技术的成熟度。
而在数据量及数据标注、验证、仿真效率达到一定高度后,人工就能从中脱手,让AI达成数据闭环,也就是自己训练自己,让训练效率更上一层楼。
但对于目前所有的国内车企来说,这个难度还是非常大的,因为大家的量产车队规模有限,导致获取的数据总量受限。
另外,如何从海量数据中快速筛选高价值数据,又非常考验标注能力,而这又要说到更多层面的问题,这里篇幅有限,就不展开了。
以点带面
所以,与其为了等待完全体的城市域高阶辅助驾驶技术落地而不断跳票,还不如现实一点、把范围缩小到消费者最常用的一小段场景里。

毕竟一段通勤路的数据量,对于车端硬件性能堆满、云端超算中心坐镇的车企来说,就像大炮轰蚊子一样好拿捏,可以更轻松地实现过拟合;另外,这些经过“通勤模式”训练的模型也拥有一定泛化性,可以反过来对其他类似场景提供借鉴与帮助。
“通勤模式”或将成为主流?
虽然目前大疆、理想和小鹏给到的“通勤模式”各不相同,并且也都还未正式上线,但在城市域高级辅助驾驶技术尚需打磨、而消费者又真切希望能够借助其降低驾驶疲劳感的情况下,“通勤模式”确实算得上是一个不错的折中方案。
而在我看来,这一模式未来可能会被更多车企接纳,成为大家接触高阶辅助驾驶的一种全新方式,在缓解通勤压力的同时,车企也能从中获益,或许随着日后“通勤模式”的正式上线,打工人的好日子也会就此来临呢?

务本户外便携灯 G5体验!灯被玩出花来?怪不得几万人花200多买它
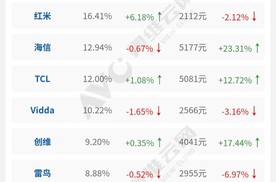
2025年6月,借助618大促、国补等市场和政策红利,线上彩电市场延续了稳健扩张的步伐。奥维云网数据显示,6月整体线上市场规模达到47.57亿元,同比增长11.58%,展现出消费电子领域的持续活力。

全球知名半导体制造商ROHM(总部位于日本京都市)宣布,与中国知名OEM厂商奇瑞汽车股份有限公司(以下简称“奇瑞”)于2025年6月5日在奇瑞总部共同举办的“奇瑞-罗姆供应链技术共创交流日”圆满落幕。

美股投资新趋势解析,XBIT详解美股开户流程及费用优化策略

现代汽车N品牌加速推动中国高性能汽车文化发展

大折叠屏手机重量只有220g左右,厚度比直板手机还要薄。那么,极致轻薄的折叠屏手机,性能会缩水吗?用荣耀Magic V5玩了主流游戏,体验出乎我的意料。

200亿元入局,TCL华星被爆投建8.6代OLED产线,中尺寸OLED面板市场风云再起。

奥维云网数据显示,2025年1-6月线上整体销量达1161.84万台,同比增长7.18%,反映出消费需求的持续释放。在价格层面,线上行业整体均价为1554元,同比小幅上涨3.07%,呈现出量价齐升的格局。

2025年开年空调市场呈现爆发式增长,但繁荣背后暗流涌动。钉科技注意到,奥维云网最新监测数据显示,1-26周(2024年12月30日至2025年6月29日)线上空调总销量高达1694.41万台,同比激增28.17%。然而与销量猛增形成鲜明对比的是行业均价持续下探,同期均价仅为26......

华为乾崑靳玉志:亲自测试ADS 4一个多月,体验非常丝滑
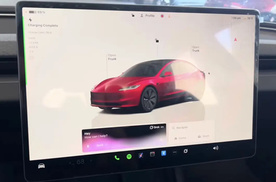
说到特斯拉的槽点,相信很多车主都会吐槽它的语音控制功能,无论是识别能力还是执行能力对比国产新势力们都有着很大差距。

比亚迪在全球率先实现媲美L4级的智能泊车,并用“全面兜底”的承诺,在中国汽车行业掀起巨浪。
全民智驾,全秦进化!作为本次OTA的重要车型,7月11日,秦L“全秦进化,泊车无忧”活动在天津举办,数百名余名媒体、用户莅临现场,抢先体验“天神之眼”的新功能,共鉴这场智能科技盛宴。

全栈华为乾崑赋能猛士M817 开启智能越野新时代

为什么265K处理器是玩《三角洲行动》的绝佳选择

智能戒指怎么选?佩戴RingConn智能戒指后,我发现真的是嘎嘎香

神奇的唯品会,2折买到了安踏

皇马“新劳尔”贡萨洛·加西亚凭借卓越的终结能力赢得关注,蓄势在2025/26赛季的西甲联赛中大放异彩。

2025年夏季的持续高温席卷全球,不仅点燃了消费者的“清凉需求”,更彻底激活了空调市场的爆发式增长。奥维云网数据显示,2025年27周(6.30-7.6)空调线上市场销售额同比激增63%,线下则暴增了120%。

打破使用门槛!绿联DXP4800:小白3分钟也能玩转,操作简单到离谱








































 京公网安备 11010102004670号
京公网安备 11010102004670号