
今年春节,余承东和绝大多数车主一样,准备自驾返程也全程使用智驾功能,可以说,2025年的春运,关键字已经不是堵车、抢充电桩或者续航焦虑了,毕竟,过去的一年,动力电池基本已经实现了包括优化电解液配方,正负极材料,成组形态在内的新技术,加码高倍率充电能力后,10分钟充200km变成了常态,插混发动机和增程器,也卷了将近一年的热效率,上千公里的综合续航和5升内的馈电油耗,也不是稀奇的事了,所以,今年的关键词,就是端到端在春运的实测效果,问题来了,全程开智驾返乡,你一共接管了几次?到了明年春节,还用自己开车吗?

过去一年,已经有车主体验到零接管了
之所以说春节是车企端到端效果的一次大考,说白了,是因为春运期间车主自驾的距离长短不一,高快城区路况复杂,平时碰不到的corner case大概率都会集中遇到,再进一步讲,就是考验不同端到端技术方案的实际接管表现了,就目前整个智驾领域来说,还是多传感器融合方案的效果更好一些。

所谓的多传感器融合,其实就是带激光雷达的端到端,前面我们也从技术角度分析过,激光雷达在构造上就和毫米波雷达不同,其更像是一组把数据处理芯片、激光探测发射器、接收器全部集成在一块的高精度传感系统,所以复杂的结构特性就决定了其职能,即通过扫图识别障碍物从而构建3D环境数据,比肉眼或传统异目摄像头架构“看”得更仔细,这也是大多主机厂认为激光雷达方案是兜底智驾安全的重要一环。

当然了,选择纯视觉端到端路线,重头戏也是在升级感知硬件体系上,比如去年小鹏提出的Lofic摄像头架构,强化了光环境的数据采集能力,至于没选择纯视觉方案的小米汽车,其提出的可变焦BEV技术,本质上也是基于摄像头,对探测性能的精化,所以,从感知硬件层面上看,激光雷达能发射的线束越多,就越能获取到更准确的数据,所对应的,是给端到端模型整个数据分析上的提升。

重点再来聊软件层面,事实上,基于目前两种智驾方案来看,以transformer为主干网络的BEV感知架构,已经是推进端到端技术的基础,这也是行业内的技术共识了,自注意力机制的优势,就在于能将大量的视频或图像信号转成规模级的数据信号,而端到端的本质,就是在感知和规控之间不再需要人工书写规则,数据量的提升,赋予了端到端模型生成式的分析和学习能力,所以,是否能给出类人的驾驶逻辑,是和数据投喂量直接相关的,再延展一句,市场基盘越大,理论上就越容易迭代整个模型的推理能力,所以,我们可以期待一下,比亚迪在今年的端到端效果。

拿目前比较主流的两类端到端技术来说,华为的GOD大网架构和理想的E2E+VLM,其实基本上已经是今年非常接近类似L3效果的方案了,具体来说的话,是整套系统的接管率实现了大幅降低,华为ADS 3.2和两年前的ADS2.0相比,百公里接管次数差不多从4-6次降到了1-2次,理想也是如此,甚至从官方给出的数据来看,接管效果更激进一些。

从软件的底层逻辑来看,华为的方案属于分段式端到端,但和理想一样都有两套系统打底,华为GOD在并入BEV之后,感知拿到数据后GOD网会直接给出执行逻辑,PDP网络更多的是在进行深度分析学习后,给出偏激进的执行方案,理想所谓的“快系统”就是E2E,给出的执行策略是之前的训练学习后的结果,“慢系统”是视觉语言模型VLM,主线任务是学习复杂场景,另外云端世界模型则是整套架构的兜底机制,通过数据还原黑盒子并尝试理解和学习,所以在某种程度上讲,这两套方案,都能看出来有类似one model形态的技术趋势,所以,不用再结合特定场景的记忆模式,也能实现自由车位到自由车位的效果,打通不限停车场且自主跨层漫游找空车位,大概率今年内就能实现。

明年高算力芯片爆发,不等L3落地也能全程放手?
话说回来,除了还没来中国的FSD,和已经成绝版的极越,还有离不开车端高性能芯片的小鹏,卓驭的7V+32T低算力平台,现在也实现了高快NOA和城区NOA,低价车也具备了高阶智驾能力,但要说达到类似L3全程不碰方向盘和更极限的接管次数,这套方案更多提升的是短途智驾通勤体验,当然了,我们也不排除corner case积累量足够后,其模型也有类似视觉语言动作模型VLA的迭代能力,不出意外,2025年可能还是技术储备期,最后拿出效果,最快也是在明年。
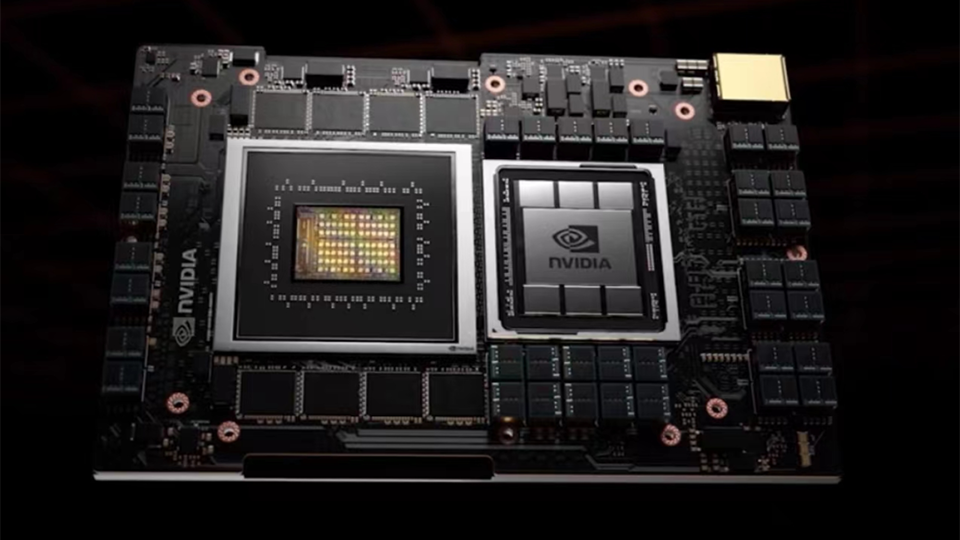
春节前的CES,差不多已经拔高了未来2-3年自动驾驶的能力下限,英伟达单颗Thor的750TOPS,是现在主流端到端方案用的Orin-X近3倍,若按照接着以2颗为智驾方案,1500TOPS的车端算力,基本上不会再出现复杂场景算不过而导致降级接管的情况,而且,从明年开始,包括蔚来、华为、小鹏、理想、比亚迪等多家国产企业,会集中量产自研高算力智驾芯片,所以就整个硬件体系里来讲,明年超过今年的端到端效果,已是必然所在,这是不是就意味着,不论L3顺利商业化与否,激光雷达和纯视觉方案,是不是都有机会来一次大迭代?
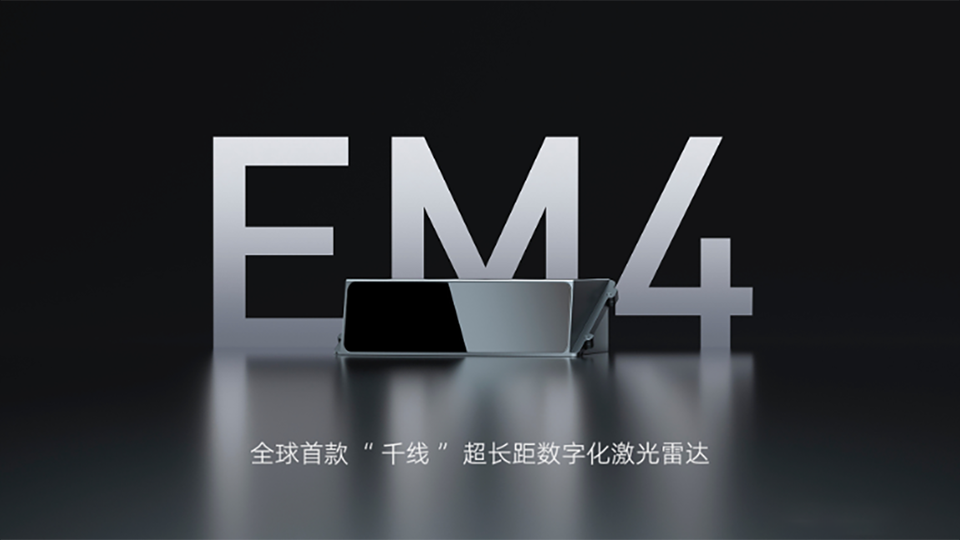
答案是肯定的,而且,前者大概率还会因激光雷达技术的演变,让整个端到端体系变得更加激进,华为的192线,现在就已经做到了自由车位到自由车位的全程智驾,禾赛的128线基本上也有类似的效果,速腾聚创在今年还把超过1000线束的激光雷达,成本控制在千元级,甚至还坐了更小的集成化,所以,有高算力车端智驾芯片打底,激光雷达不用高性能,端到端的自适应生成迭代能力也会有更进一步的表现。

不出意外,小米在引入VLM之后,大概率会是继华为ADS 3.2和理想之后,最快赶上千公里零接管的端到端技术,本质也是需要高算力芯片提高模型的推理能力,可以给出的判断是,这三家端到端技术架构,接下来都会围绕视觉语言动作模型VLA展开做文章,不同之处,可能会在执行细节呈现的体验维度上,偏激进的会更果断,偏保守的也会演变成更接近人类驾驶员的驾驶习惯,所以,不用等L3量产落地,最快在明年春节的时候,全程用智驾回家不碰方向盘,实现起来基本不会是问题了,想象一下,当越来越多的高阶智驾车出现,春运高峰还会像之前那样,在高速上动辄堵上数小时吗?

近日,汽车门网公布了2025年6月投诉指数数据,其中中型车投诉指数2240.4,环比下滑9.13%。秦L排名首位,降价增配仍是车主投诉的焦点。

奕派科技重磅发布“未来之翼”战略,央企新势力乘风启航

2025年7月29日,经国务院批准的中国长安汽车集团正式成立,这不仅是企业名称的更迭,更是代表长安汽车正式升级为肩负国家战略的汽车“国家队”。

近日,汽车门网公布了2025年6月投诉指数数据,其中紧凑车投诉指数2096.55,环比上涨22%。英朗排名首位,投诉指数大涨67.2%让其持续霸榜。

从军车到民用车,东风安全血脉的岚图答卷

环保责任双先锋,DHL快递中国区再度荣登ESG先锋案例双榜

8月1日,东风奕派汽车科技公司战略发布会暨新车发布会在武汉隆重举行。

2025年8月1日,一汽丰田率先公布7月销售成绩;7月销售新车68034辆,同比增长3%,继上半年同比增长16%之后,再次将正增长时间记录拉长,说明其“合资新力量”的成色更足了。

2026款东风奕派eπ008六座版焕新登场,17.36万起享座座头等舱体验

如何实现品牌跃升?

车圈大事 奕派科技正式成立,2026款奕派008六座版上市
8月1日,东风奕派汽车科技公司战略发布会暨新车发布会在武汉隆重举行。

近日,汽车门网公布了2025年6月投诉指数数据,其中SUV投诉指数5795.4,环比上升2.08%。宋L DM-i排名首位,虽然投诉指数下滑幅度达到42.66%。

向上攀爬的中国制造,为何总被暗箭射中领航的翅膀?
WAIC 2025:开普勒大黄蜂挑战8小时直播圆满收官,引领具身智能商业化新征程

新央企赋能 长安启源全面发力 #央企新能源当然选启源 #新央企新启源 #智能移动生活家 #长安启源Q07

测试100分,实战为0?理想i8挑战8吨卡车成争议!智能化加持安全?

近日,东风柳州汽车发布声明,就某汽车品牌针对乘龙卡车开展对撞测试作出回应,同时表示将追究该汽车品牌的法律责任。
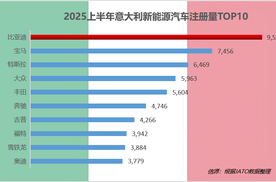
2025上半年比亚迪全球市场销量情况

多家奔驰4S店倒闭,BBA豪华局,正在悄然落幕?





































 京公网安备 11010102004670号
京公网安备 11010102004670号