具备自主预判性,才是真正的智能辅助驾驶。
一万年太久,只争朝夕。高阶智能驾驶辅助正驶在发展的快车道上,技术迭代几乎在以一年一大版本的节奏演化着。头部玩家们2023年开推“无高精地图”路线,24年主讲“端到端”故事,25年则流行起了“世界模型”。
而当版本迭代到“世界模型”后,驾驶辅助终于开始展现出真正的智能,因为系统被赋予了自主预判的能力,它开始变得像一个拥有自主意识的人类了。
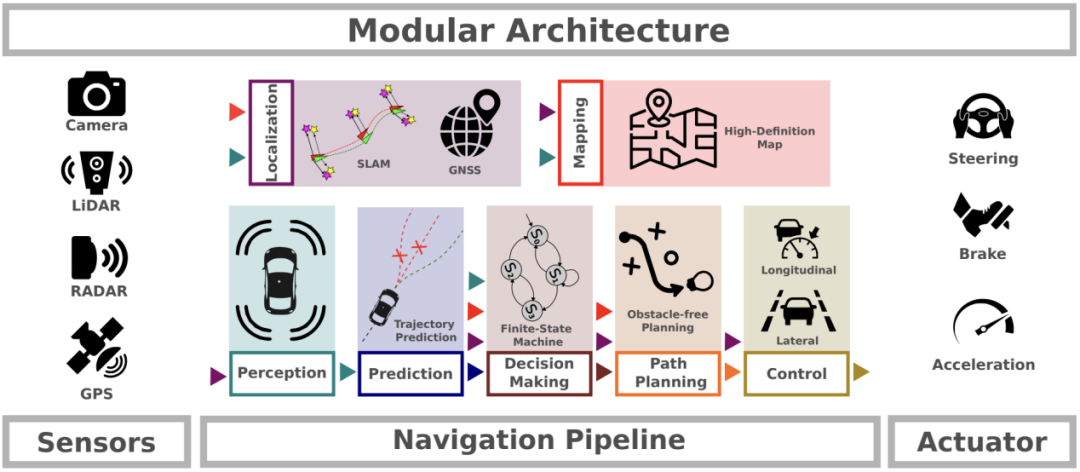
智能驾驶系统利用高清摄像头、激光雷达、毫米波雷达等感知硬件探测出周围的环境,在理解了外面的世界后,汽车才能在做出通行策略,并执行正确操作。
但外界环境对于智能驾驶系统来讲,还是过于复杂了。不同特征的道路规划、不受控的行人、不规则的车辆、不可控的天气状况等,都是不确定因素,造成的结果就是,未知“极端个例”永远海量般地存在着。身陷在一个个新的Coner case中,智能驾驶自然就成了“人工智障”。

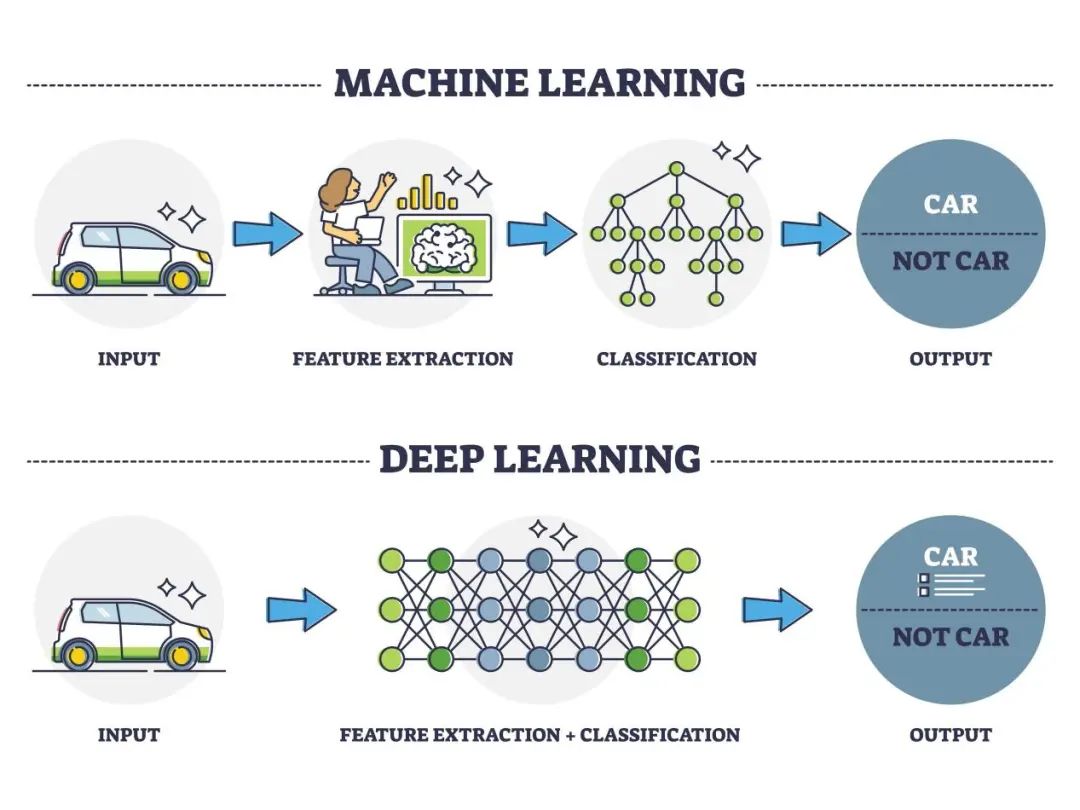
端到端智能辅助驾驶缩短了程序链路,尤其一段式的端到端,把感知、决策、执行环节整合进统一的神经网络之中,一定程度上提高了系统的应对效率,因此被认为更具泛化、适应能力。
但如果智能驾驶的底层逻辑仍停留在“规则主导”上,依靠数据投喂,覆盖新的个例场景,并制定应对的规则,就永远是在进行一种“填鸭式”的被动学习。
这个过程中,不仅海量的数据冗余带来标注负担和算力浪费,还永远无法完全覆盖所有“极端个例场景”。驾驶关乎人身安全,一般情况下,不允许妥协,而陷入“龟兔悖论”中,也就意味着永远达不成真正的智能驾驶。
真正的驾驶,并不应该是看到信息后机械似地做出被动应对,而是结合过往经验,理解所处的环境,在大脑中形成提前的预判,或做出灵活的应变。
这恰是面对未知的极端场景,系统与人类的本质区别所在,而预见性的自主判断和灵活的决断,正是世界模型期许到达的未来。
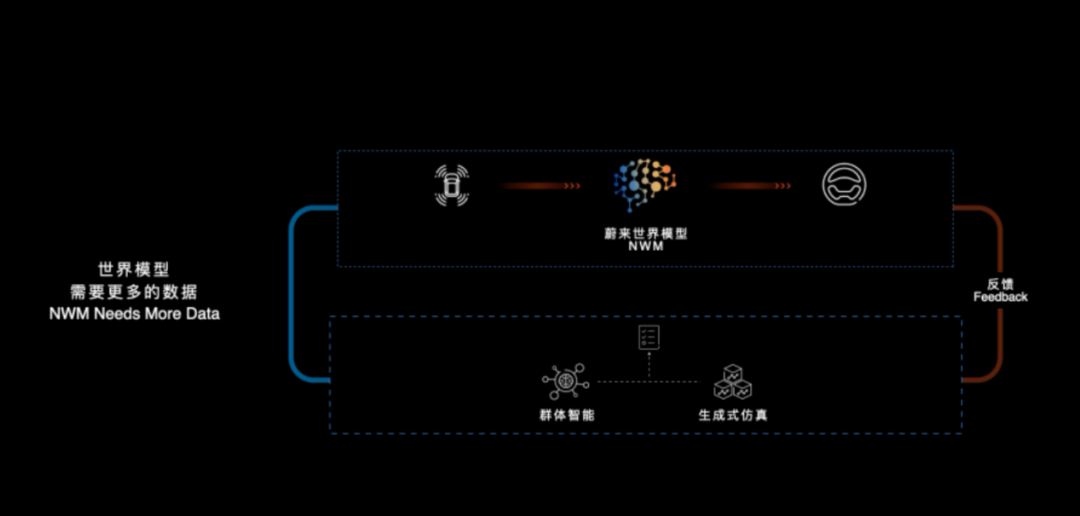
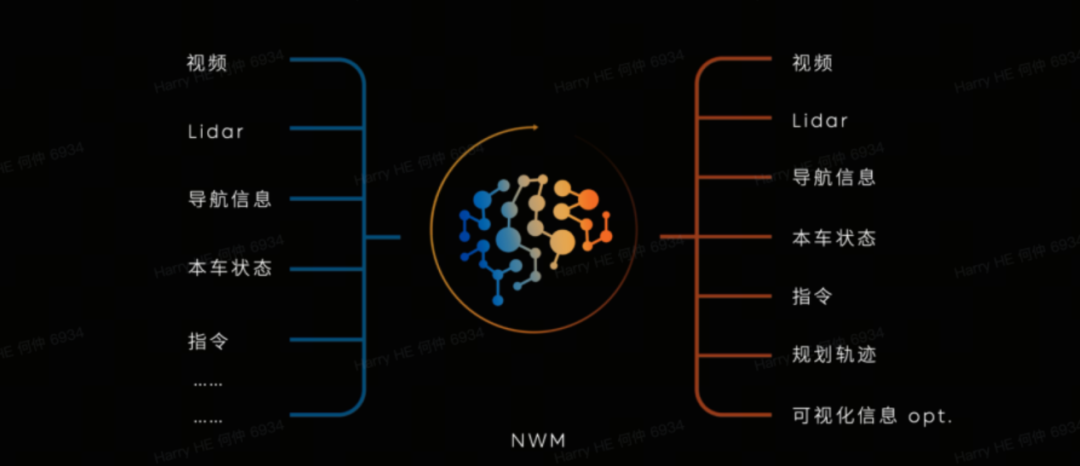
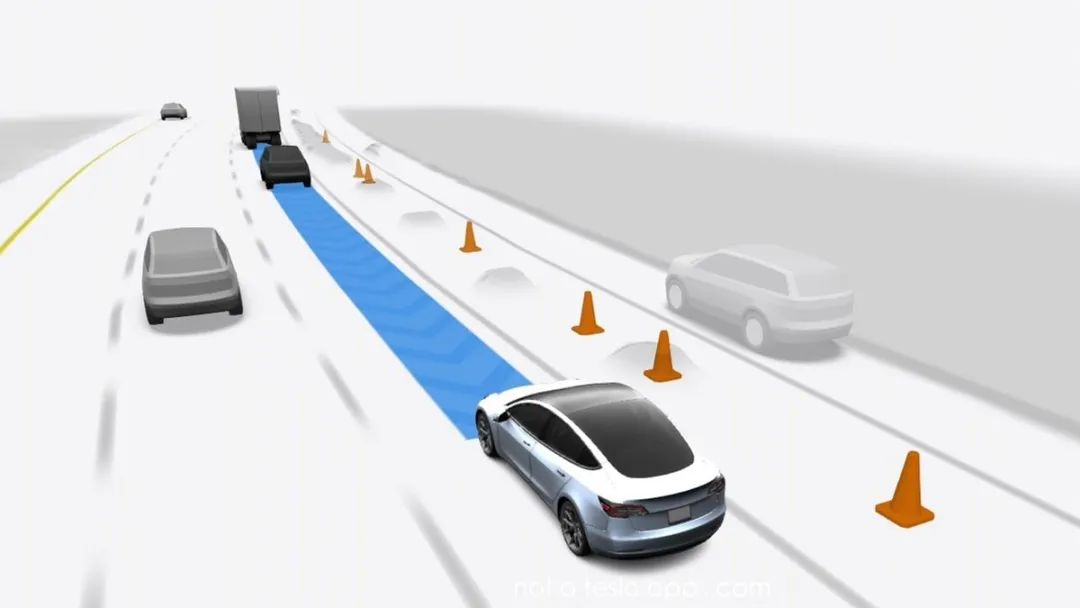
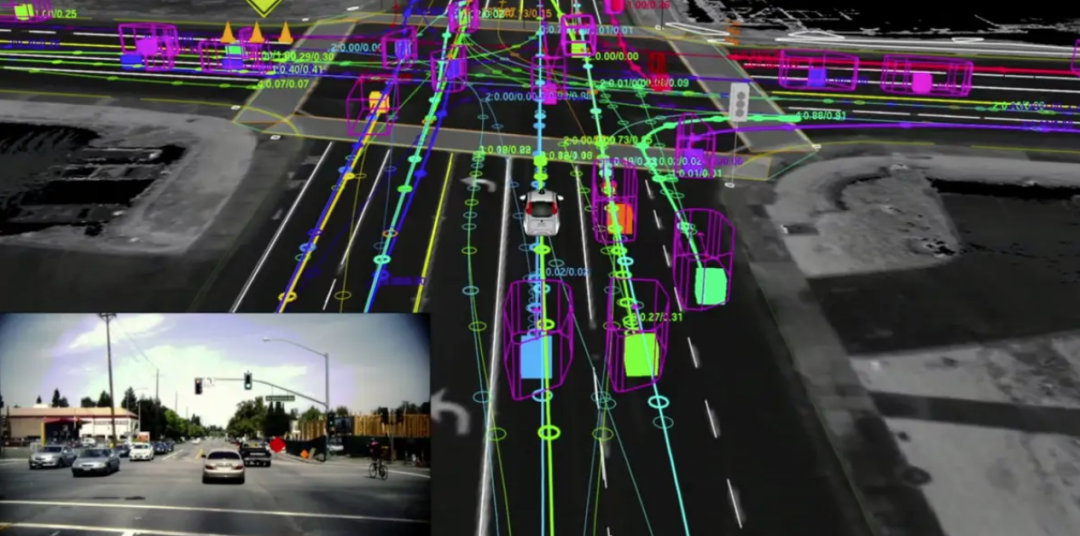
例如在蔚来最近发布的NWM世界模型中,系统每0.1秒可生成超200种的可能轨迹,并且会在下一帧信息输入后,筛选最佳路径,这个过程其实就是在模拟人类驾驶员“反复评估—微调—决策”行为。
世界模型这种生成式人工智能如此特别,在于其可以“反事实推理”。系统不仅被动地接受我们赋予的限制条件和对应决策,还能够思考如何类似、但还未实际经历的情况下,做出合理的决策。
系统就像一个开始萌发自主意识的孩童,不光观察、学习着周遭世界,还在执行、模仿之余,拥有“举一反三”的思考能力,去主动探索这个世界。
特斯拉FSD入华后,虽然出现了很多适配性方面的问题,如看不懂交通标识、占用非机动车道等,但体验过FSD的业界大佬,都不约而同地认可特斯拉是当下最成熟的智能驾驶,驾驶得很丝滑。
特斯拉给人的感觉是,它像个不太熟悉中国交规、路况的老外,经常出错,啼笑皆非。但它又确实是懂怎么开车的,是当下最接近人类驾驶员的智驾系统。
特斯拉很少纰漏其智能驾驶方面的技术细节,但可以确定的是,特斯拉很早便开始利用高效的大模型,来加速数据驱动下的系统进化,这其实也是行业头部玩家们都在角力的赛道。
2025年CVPR辅助驾驶国际挑战赛“端到端辅助驾驶”赛道,NVIDIA辅助驾驶应用研究团队通过泛化轨迹评(GTRS)方法连续夺魁。
这次挑战赛的主题恰是“实现通用的具身系统”,也即基于数据驱动的非反应式辅助驾驶仿真框架,NVIDIA泛化轨迹评(GTRS)方法的核心正是生成各种轨迹,并逐步筛选出最佳路径。
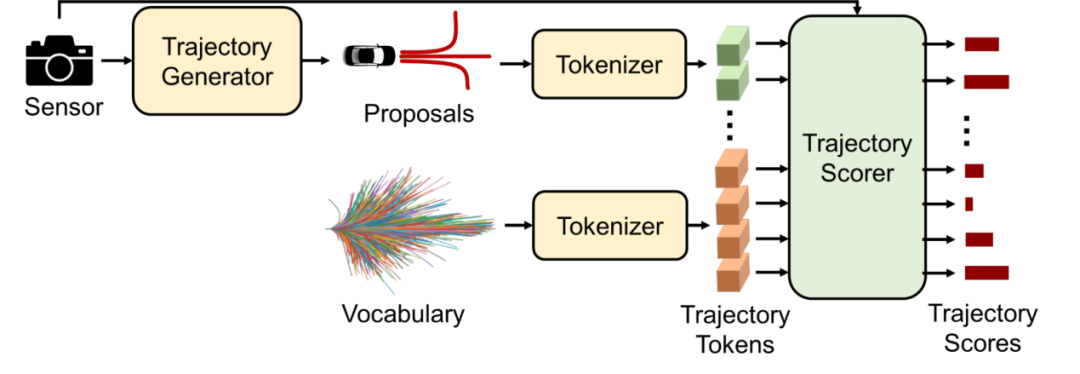
基于感知到的环境,GTRS可扩散性地创建出涵盖各种情况的粗略轨迹集和适用于安全关键情况的细粒度轨迹集,然后利用依赖感知数据训练出的Transformer解码器,捕捉相似轨迹之间细微但关键的差异,逐渐筛选出最具可能性的候选轨迹。
其实早在CES 2025上,NVIDIA发布的Cosmos™便是一个为具身智能打造的集成平台,整合了前沿生成式世界基础模型的各个环节,用于加速数据处理和管理,目的就是为世界模型训练提供支持,加速智能汽车、机器人的物理AI开发。
当强化学习的效率被提高,智能驾驶终于开始展现出“所有AI项目之母”的潜力,虽然曾经这么认为的苹果CEO蒂姆·库克早已经放弃了造车。

世界模型远不是自动驾驶的终点,需要解决的问题有很多,例如模型训练时长、构架精度优化等,不同玩家间的路线和策略也很不同,以“蔚小理”为例:
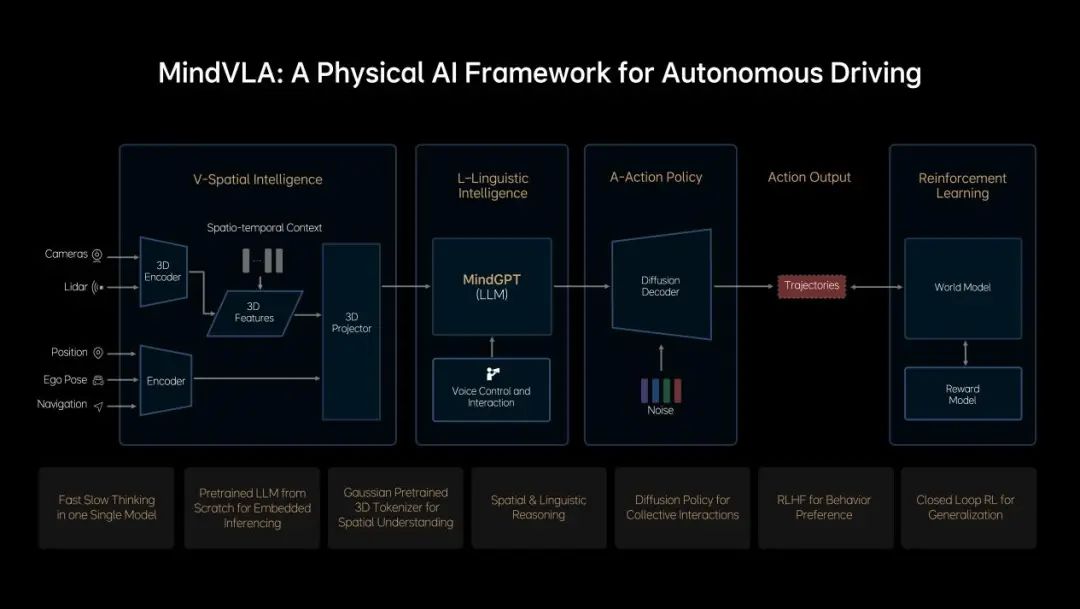
蔚来NWM的核心是模型重建,结合视频自监督方式生成轨迹;小鹏的XVLA侧重高频闭环训练来加快车端部署和提升用户体验;理想MindVLA则强调了语言模型与扩散建模的融合,很独特的侧重点。
但随着世界模型等推动强化学习的效率提升,底层的技术在加速迭代,最终也会反应在表层的产品体验上。
曾经,参加厂家有关智能驾驶的试驾体验,多少是有些抗拒的。在我眼中,用着依赖高精地图的智驾版本,行驶在厂家规划好的单调路线上,和乘坐“有轨电车”的区别也不算明显,味如嚼蜡。
现在,汽车面对未知环境时生成无数模拟线路,并根据实时信息选择或是调整最优路线的方式完全不同,有些像奇异博士,可以看到无数条未来的时间线,并选择最优解的那一个,酷的。
没错,汽车通过强化学习,拥有自主预判性,开得更像人类,而不是按照既定规则去机械死板地行驶,很重要。
不久前,连续体验了三款不同品牌、价位、感知策略的车型,实际感受大相径庭。其中两款价位相近、同为纯视觉感知、主打“科技平权”的产品:
搭载德州仪器TDA4 VH智驾芯片(官方未明确信息,可能旗舰版搭载3颗TDA4 VH,等效96TOPS算力)的桂B车型,在用户体验的完成度上,主要是最体现智驾功力的领航辅助驾驶功能,尚不及接手自滴滴、换装2颗NVIDIA Orion-X智驾芯片、等效508TOPS算力的新势力粤A车型(尤其该车与路上其他车辆进行路权博弈时,竟有点人类驾驶的味道了)。
花小钱、办大事,采用高性价比智驾硬件,推动“科技平权”,并在泊车等方面带来切实好用的功能,不失为一种成功的产品策略。
但如果想把“科技平权”贯彻到底,基于前沿硬件的高昂研发投入是必要的。智能驾驶走向普及,性能向上的突破与价格向下的普惠,相辅相成,缺一不可。
实际上,桂B厂商也已经在规划了,在技术进化日上宣布,将会在未来采用NVIDIA Thor芯片,并加快大模型的上车与提高数据驱动的效率。
而首搭700TOPS算力的NVIDIA Thor芯片、多模态大语言模型、激光雷达和高清摄像头,则可以快速赋予一台售价30万元以上的自主大型SUV该有的智能化水准。
但拿到Thor芯片流片用来匹配、开发的时间还是太短了,仅仅一个多月,所以就用户体验而言,还需OTA升级几个版本后,这台杭州湾品牌的旗舰SUV才能达到令人满意的成熟度。

对于智能驾驶辅助,硬件基础依然是必要的,但不能确保带来优秀的用户体验,这就像一些复杂、优质的食材要经过大厨的精心烹饪,才会是美味佳肴。而这,是个争先、投入、探索、迭代的过程。
特斯拉自研的HW3.0系统在2019年便拥有了144TOPS算力与高清摄像头。蔚来2022年在ET7上落地了1016TOPS的智驾算力与激光雷达。小鹏也是最早在紧凑级家用车上部署激光雷达,虽然现在开始转为“纯视觉+高算力”为主的路线。
大模型的更新与智驾芯片算力的军备竞赛还在被推向新高,小鹏正在研发 720 亿参数的基座模型,大约是当下主流VLA模型的35倍,并构建了一个相当于万卡集群的10EFLOPS算力的超算中心。
小鹏G7搭载3颗图灵AI芯片,算力达到2200+TOPS。蔚来自研的5纳米神玑NX 9031芯片的流片在2024年实现了流片。特斯拉HW5.0芯片算力也可能达到2500TOPS。

高度自定义硬件底层的高算力自研智驾芯片,与超算中心和强化学习模型,组出了驶向完全自动驾驶的车具。
基于“高算力+高感知”积累下的有价值的数据喂养,经过端到端、世界模型等先进模型的强化学习,让智驾头部玩家们可以展现出领先的体验与可期待性。
后来者切换或者构建出自身智驾体系时,可能会还要面对,一边经历着初期有效数据和训练量偏少而造成的体验波动,一边看着“早鸟们”极速向前迭代。

很有趣,这种先发优势,有点类似于欧洲车企们在底盘调校方面的积淀与造诣。就像法系可以把扭力梁调好、保时捷能把麦弗逊玩出花活,特斯拉和一些自主品牌也在智能化方面展现先出独到优势,辅之与供应链的良好合作,这会是智能电动时代定义领先的新能力。
本文作者为踢车帮 孙小树

追觅要做电视了,很多人看到这个消息可能都不敢相信。见过跨界的,没见过这么跨界的。从扫地机器人这种小家电一步跨到智能电视这种大家电,两种完全不同的领域,能成功吗? 还别说,追觅不仅要入局电视,还要在今年9月份德国IFA上携带自家电视、音响、显示器、投影仪等正式亮相。那么,追觅科技......

未来追觅电视有望成为高端电视市场的领军者

蓝宝石作为AMD显卡的头部品牌,超白金系列一直是“堆料”的代名词。这次入手的AMD 7900 XT超白金OC,即便放在降价后的四千元档,依然保持着旗舰级的做工: 首先就是散热系统真的是堪称奢华,拿在手里的分量就知道,7根镀镍热管+真空腔均热板+三颗双滚珠轴承风扇,支持正反转设计......

2025年8月15日,以“破局者 · 智行合璧”为主题的2025戴尔科技峰会在北京中国大饭店盛大启幕。作为戴尔科技大中华区极具战略意义的年度旗舰活动,本届峰会吸引逾千名行业领袖、企业决策者与技术专家齐聚北京主会场,并与上海、深圳、青岛、武汉四大卫星城市分会场实时联动。

血压计你选对了吗?实测町石tinx臂式无距血压计,测压快准稳

“国补+高温”,让今年的空调市场异常火爆,行业里也混战一片:美的、格力、海尔三足鼎立的大格局未破,不过海尔、格力的拉锯让座次争夺暗流汹涌;小米凭借强大的营销拉力凶猛冲量,海信、TCL试图以新风标签撕开市场,奥克斯则借上市IPO谋求东山再起,众多中小品牌在低价带寸土必争……空调大争......

别再为拍视频抓狂了,实测奥川M3 Pro,一杆解决所有拍摄难题

在炎炎夏日,一杯加冰的冷饮无疑是驱散暑气的绝佳选择。自动制冰冰箱的出现,让人们在家就能轻松获得冰块,满足对冰饮的需求。但面对市场上琳琅满目的自动制冰冰箱,消费者该如何挑选呢?

当笔记本开始“喷香水”:华硕a豆联名娇兰:科技与优雅完美邂逅

当香氛漫过键盘:华硕a豆×娇兰闪光礼盒,重新定义数码产品的“情绪价值”

英伟达“后门”风波再起,国产芯片机会来了

七月骄阳似火,中国两轮电动车市场同样热度不减。 钉科技注意到,最新出炉的数据描绘出一幅产销两旺的繁荣图景:奥维云网数据显示,7月全国产量攀升至748万台,同比增长30.6%;总销量也达到724万台,同比增长24.3%。其中内销出货682万台,同比增长24.3%;出口量41.8万台......

在洗衣机市场的激烈竞争中,三筒洗衣机正逐渐崭露头角,成为众多消费者关注的焦点。钉科技注意到,近日,海尔和美的两大巨头纷纷布局 850mm 标准尺寸的三筒洗衣机,旨在满足消费者对于空间利用和多样化洗涤需求的追求。

小米智能摄像机4C 3.5K,智能看护实力派

近期,智能辅助驾驶系统安全事故频发、大规模实测表现堪忧,叠加监管部门接连划定安全红线,其安全可靠性正遭遇前所未有的公众信任危机。7月23日,国家公安机关强调,将协同有关部门进一步加强“智能驾驶”规范管理,标志着行业监管从“事后整改”转向“事前预防”的国家级体系化治理。

作为新能源SUV市场引领者,比亚迪宋家族已收获380万用户的选择与信赖。其中宋L DM-i和作为中型SUV市场领军车型、宋 Pro DM-i作为A级SUV市场销量冠军,均以越级产品力引领各自细分市场发展趋势,并受到了广大用户认可。
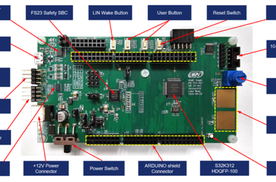
今天大联大控股宣布,其旗下世平推出基于恩智浦(NXP)S32K312 MCU、FS2303B安全电源管理芯片以及TJA1443ATK高速CAN收发器和TJA1021TK高速LIN收发器的汽车通用评估板方案。

散热逆天!奥睿科SOC冰甲固态硬盘体验:7450MBs无压力

雷柏V700DIY-98体验!客制化键盘天花板?颜值、手感、布局全在线

70迈 A810 PRO行车记录仪评测:小屏幕大功能,清晰记录每一瞬间







































 京公网安备 11010102004670号
京公网安备 11010102004670号