
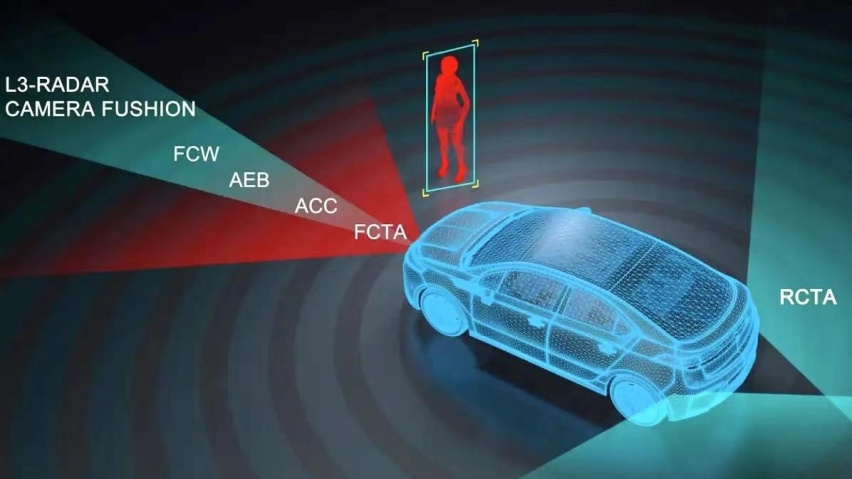
一提到幽灵刹车,大家脑中第一个浮现的应该就是特斯拉,从2015年至今,特斯拉的幽灵刹车问题变得越来越严重,但很少会听说其他车企有幽灵刹车的问题。可就在最近,同为美系品牌的通用汽车,也出现了幽灵刹车的情况,而且官方已经开始介入调查。
日前,美国国家公路交通安全管理局(NHTSA)宣布,对通用公司旗下的自动驾驶业务部门Cruise进行调查。NHTSA 表示收到了3起交通事故报告,认为这些车辆在提供自动驾驶出租服务时,出现了“不当急刹车”而导致事故,并且有乘客被困车内。如果说特斯拉是因为采用了纯视觉自动驾驶,才导致了无休止的“幽灵刹车”,那么头顶激光雷达的通用Cruise自动驾驶运营车辆,为什么也能出现类似情况呢?

在全球自动驾驶行业出现颓势的当下,自动驾驶出行公司、研发企业都在经历着不同程度的困难,而通用的Cruise是在其中很少的还在积极扩张的企业,通用汽车CEO玛丽·博拉表示,预计在2023年,通用汽车将继续每季度支出5亿美元、每年支出20亿美元用于Cruise扩张,虽然目前只是小幅度地在美国加州进行试运营,但是通用非常信心满满的要把它做大做强,特别是在行业下行的大背景下。
但是现在它出问题,而且犯了这种牵动大家敏感神经的问题,特斯拉的“专属”问题,现在终于有伴儿了。“幽灵刹车”通常是指用户在开启自动驾驶辅助系统后,在不特定时刻或者场景下,刹车功能会不受驾驶员控制,突然启动介入,导致车辆快速进入不必要的减速状态,从而极大提升了发生追尾事故的潜在安全风险,通用的自动驾驶出租车这一次正是因为突然刹车导致的后方追尾。
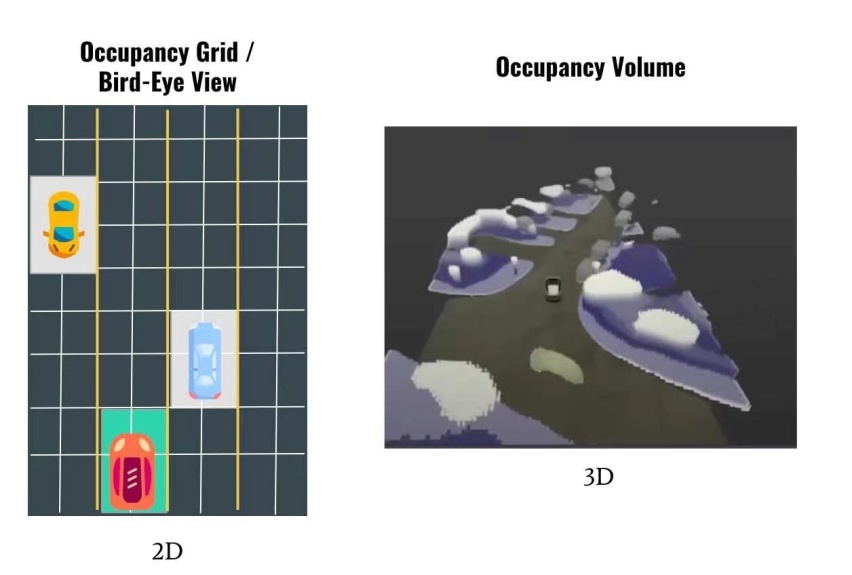
通过特斯拉的幽灵刹车事件,大体总结为两个版本:早期的特斯拉幽灵刹车是因为但是的版本比较初级,在识别一些投射的影子等不存在的事物时,会触发主动刹车,可以说这是幽灵刹车1.0版本。而后来的幽灵刹车是因为前向的毫米波雷达,对金属材质非常敏感,包括指示路标和交通路牌、人行天桥和中央护栏,特斯拉在毫米波雷达在识别到这些事物时,很可能会出现过度紧张,从而触发主动刹车,这就是幽灵刹车的2.0版本。如今,特斯拉在海外已经彻底取消了所有雷达传感器,但是幽灵刹车依然频发,纯视觉的算法还有3D视角的占用网络依然会有差错,导致幽灵刹车,目前可以看作是2.5版本。而视觉算法的不完善也会是其他车企的车型出现幽灵刹车的原因。
要说纯视觉的特斯拉难以避免问题大家习惯了,低成本解决方案就要面对这些更多不确定的问题,那么武装到牙齿的通用Cruise自动驾驶出租车为什么会有问题?
这次出问题的是通用Cruise的第四代自动驾驶汽车,车辆基于雪佛兰Bolt车型开发,配备了5个激光雷达,16个摄像头以及21个雷达,这款车的亮点在于车内没有方向盘以及油门刹车踏板,全程无需驾驶员控制即可实现自动驾驶功能,可以理解为是L5级的完全自动驾驶车辆。这台车的硬件方面,可以说是完全挑不出什么问题来,自动驾驶芯片采用了英伟达的定制化芯片,而且也是多可叠加。

而问题很有可能还是出现在了静态杂波过滤这个问题上,大家看到这个词可能会比较熟悉,在解析自动驾驶难以识别静态物体的文章中,我们多次提到这个词语。这个问题的处理方面,很容易就会走向极端,也就是过滤了不该过滤的,就会出现不识别静态物体,直接撞上去,如果该过滤的没有过滤,就会出现幽灵刹车。

对于通用的自动驾驶车辆来说,这个问题就变得很艰巨了,5颗激光雷达和21个毫米波雷达+超声波雷达,让它拥有了很完整的雷达感知能力,这已经是非常“爆炸”的冗余度了,但是它们依然是使用了以视觉为主导的自动驾驶。
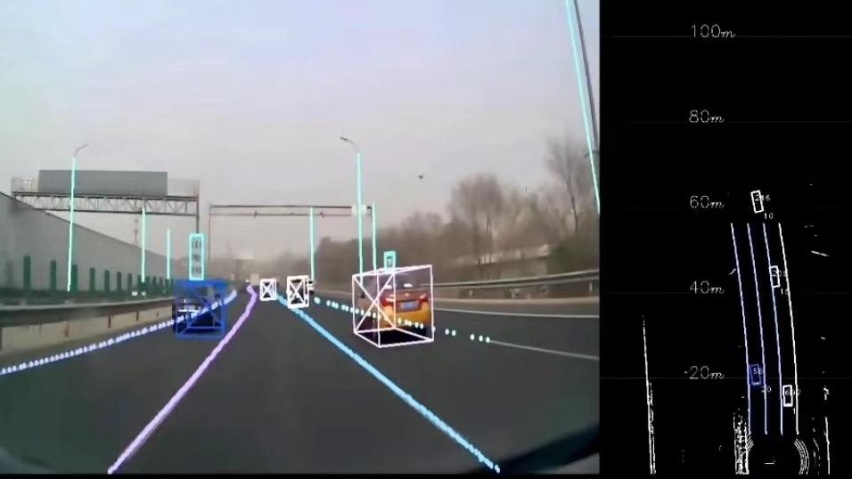
通过视觉途径来感知周围的物体,利用中央计算平台完成数据处理,而后再向各个工作模块发出指令,摄像头是可以认得出这里有个东西的,但是它和我们人类的逻辑不同,系统的眼睛在处理场景时对物体的感知和分类或者说是辨别,是协同工作的,如果眼睛看到的一个东西,但辨别不出物体,系统可能就会则会默认过滤掉这个信息,说直白些就是既然不认识,那就等于不存在,直接摆烂。虽然已经有了很多分类学习、归纳等等,但是仍不能确保万无一失。

而在加入了大量的雷达传感器后,冗余度确实会变得更高,而不管是激光雷达还是毫米波雷达都会涉及静态杂波过滤的问题,而我们上面说的视觉感知躺平摆烂,也是差不多的意思,当视觉躺平之后,重任就要落在雷达传感器上了,一般的毫米波雷达不具备成像能力,感知出的世界是一个2D效果的,而激光雷达的点云密度更高,是可以构建3D效果的,虽然精度更高,但是感知的内容也就会更多,更多的干扰项被收集进来,特别是通用这款车还有5个激光雷达,进一步加剧了静态杂波的识别难度,而视觉躺平后,雷达系统就被委以重任了,很容易就会触发“保守”指令,也就是触发刹车。
所以,你是用的传感器数量太多了,确实会增强感知能力和冗余度,但是一些感知硬件的硬伤也会被成倍的放大,这就是一个很大的矛盾点。如果说通用这种用5个激光雷达,21个其他雷达的方案不具备代表性的话,那么国内目前的激光雷达的视觉融合方案,使用多颗激光雷达以及数量很多的毫米波雷达的车型也有不少,它们虽然还停留在辅助驾驶这个阶段,虽然硬件是够L4的,但是如果它们真的要按高阶自动驾驶的要求行驶的话,像这种触发系统“保守”应对的幽灵刹车也会在所难免,你用的硬件越多,出现幽灵刹车的可能其实应该越大,因为话语权比重这个问题会被放大。

虽然目前的视觉+多传感器融合方案,还没有爆发出很多的幽灵刹车情况,但是日后大范围爆发的可能性还是比较大的,而相反别看特斯拉是幽灵刹车的代言人,但是特斯拉很有可能会率先走出幽灵刹车的车企,因为没有雷达传感器,少了这一层感知冗余,但是它也少了这一层最冗余触发幽灵刹车的羁绊,FSD+后台的不断学习,还有占用网络技术的应用,都能让特斯拉对于周边的感知变得更加立体,可以最大限度地避免幽灵刹车,也就是说纯视觉这个被大家诟病出现幽灵刹车的“元凶”,也是最好避免幽灵刹车的解药。

目前国内外的自动驾驶,几乎走的都是视觉+雷达这条路线,国内的企业们还加入了高精地图,视觉虽然是主导,但是这些辅助性的感知硬件很有可能在一些场景下成为导致问题的导火索,而你卷上去更多的硬件,就会把风险推得更高,硬件固然是很重要,但依然要把重心放在细化算法上,已经有越来越多的例子向我们想证明了这一点,特斯拉虽然因为纯视觉让大家不放心,但是在我们今天讨论的这个领域,特斯拉的视觉算法优势,配合最简单的硬件,却能比较完美地解决问题。这一次通用被调查,其实更是为给全行业敲响了警钟。

高价驾驶辅助到底在行方便还是在添乱

在宝马的新世代产品将重新定义智能驾驶:不仅仅追求单一的智驾辅助能力,而是致力于打造交互、操控、驾驶辅助的整体性智能驾驶解决方案,重新定义智能驾趣新纪元。
2025年上半年,智能投影并没有像其他3C家电产品一样,在国补政策的拉动下,实现市场的高增,而是进入到“量额双降”的不利境地。

小牛抛出“顶配模板”,能抄完我叫你大师!#小牛电动#小牛NXT#小牛FXT#大师标准#不怕被模仿

R5-3500U和Vega8核显很能打,整机颜值也很在线

雷柏V700DIY-98快银轴背光多模版键盘评测:机械手感的极致追求

当全球电视行业陷入存量博弈的焦虑时,TCL电视凭借“中高端+大屏化”战略的深入实施,用业绩与销量的双增长实现破局。7月22日,TCL电子发布上半年业绩预告和TV销量数据:上半年净利润预计大涨45%-65%,全球TV出货量以1346万台稳居世界第二。
小牛真技术不在彩屏音响!同行颤抖:这怎么跟?#小牛NXT#小牛FXT#大师标准#小牛电动车#新国标电动车

高端显示技术,暗潮汹涌。

骁龙8 Elite玩游戏怎么样?一文揭晓终极答案

AI找片黑科技!问台词直接跳转华为视频,观看《凡人》热血修仙
朴赛AI服务器引爆WAIC 2025:场景化算力是智能时代的“水电煤”

14600KF性能暴涨36%!玩家实测IPO黑科技,这提升太离谱了

2025年夏季,空调行业正经历政策与自然的双重“热浪”冲击。财政部第三批国补资金690亿元在7月下达,全年以旧换新补贴总额高达3000亿元,覆盖时间延长至全年,且单用户空调补贴上限从1台增至3台,最高单台补贴2000元。与此同时,全国多地遭遇极端高温侵袭,7月黄淮、江南等地最高气......

学生党买什么电竞显示器好?上手科睿X3,堪称600元档配置天花板

7月29日,2025年《财富》世界500强榜单揭晓,全球企业竞争格局再度刷新。本次榜单入围门槛提升至322亿美元,印证了全球经济体量的持续扩张。中国企业中,美的、小米、海尔三大家电与科技巨头表现尤为亮眼,以显著的排名跃升和扎实的业绩数据,展现了中国制造的韧性与创新动能。
1w2售价竟下1w血本!网友:这价格能回本吗?#小牛NXT#小牛FXT#小牛电动车#友商看到生死难料#大师标准

605km续航18分钟快充!海狮06EV杀疯了:卷到15万级纯电SUV天花板

14600KF VS 7800X3D:千帧神 U 背后的恶意营销与真实性能

在科技飞速发展的当下,AI 与高性能计算已成为各行业进步的核心动力。影视特效渲染、科研数据模拟、工业设计建模等场景,都对硬件性能提出极高要求。AMD 锐龙 Threadripper PRO 9000 系列处理器的登场,吸引了全球专业用户目光,而安耐美 LIQTECH XTR 幻彩......






































 京公网安备 11010102004670号
京公网安备 11010102004670号