我感觉,当年高速场景导航辅助驾驶的竞争,远远没有今天的城市导航辅助驾驶大乱斗精彩。城市导航辅助驾驶的情况可以用“并排冲线”来形容,大家都是无高精地图,都是以城市为单位三季度小范围推送,都是年内拓展到几十上百个城区。总而言之竞争非常激烈,人人都想赶紧落地这个功能,好让自己接下来宣传“自动驾驶”“无人驾驶”的时候,心里多一点底气。
因为硬件搭配等种种原因,当初的“御三家”里,理想是最晚落地高速导航辅助驾驶的。可能是出于这个原因,理想有一段时间并不怎么强调自己的智能驾驶技术发展。这种情况大概持续到 2023 年初,我们才突然发现,理想的智能驾驶水平不单有,而且还挺高。

经过上海车展和家庭科技日的预热,我们这次总算有机会实地体验一下理想的城市 NOA 了。下半年就要推送的它,现在到什么进度啦?

【城市 NOA 及通勤 NOA 的基本原理】
讲体验之前还是得老生常谈一下,理想实现城市 NOA 的基本技术路径。其实这一波城市导航辅助驾驶爆发,大家的技术是趋同演化的。简而言之,都是用 BEV 鸟瞰式感知架构观察世界,再用 Transformer 模型理解世界,最后用大量行驶数据在训练集群中抽象并“看破”这个世界,把 AI 变成“人”。
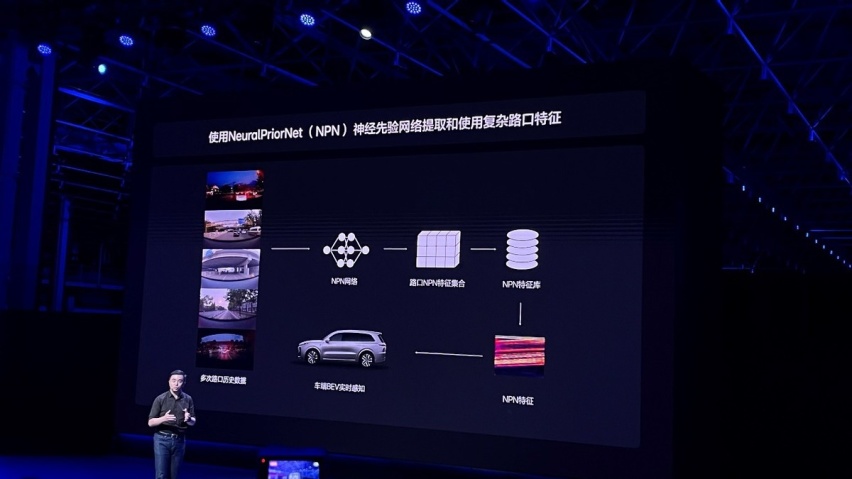
大家都这样玩,不代表就是带着镣铐跳舞没有发挥空间。理想在“观察”环节也就是 BEV 感知架构中,增加了 NPN 神经先验网络,反复提取环境特征来增强 BEV 对世界感知的稳定性;TIN 信号灯意图网络看起来则是 Transformer 模型原理的具体应用,通过选择“可能性最大的结果”来判断交通信息与动态。

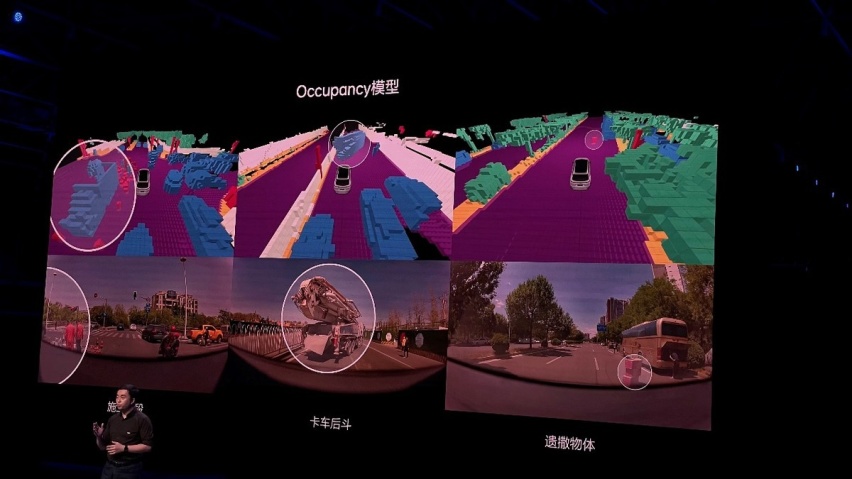
然后就是在二维画面中看出三维的精确距离信息,并精准获得周围空间信息的、大名鼎鼎的 Occupancy“占用网络”模型,它能相对精准地判断出可通行路面,从而不再需要高精地图信息作为感知的辅助,而只需要导航地图作为对方位、目的地的大体了解即可。
这些数据塑造的模型,连同人们使用这些模型后的反馈,都会作为算法模型下一步训练的素材,被放到专用的训练计算机集群里,让算法自己迭代优化。然后,加上针对个别场景的一点点规则、例外,再经过仿真和工程车路试确定安全,就可以推送给用户完成下一次循环了。考虑到理想汽车在道路上的数量,这个循环的速度理论上是很快的。

通过这样的循环,理想就可以啃下一个个关键路段节点。当某个地区的节点都训练到位了,这一地区的城市 NOA 就会开放。为了加快这个进度,理想还推出了针对个人用户的“通勤 NOA”,训练个大概三周左右,用户就能在上下班通勤路线打开城市 NOA。一条条通勤路径,最后汇聚成一个片区,一座城市。

【8 次接管,还能叫好吗?】
当然这些幕后工作,理想汽车的用户是不会看见的——至少不会完全看见。他们能接触到的只是看上去略显传统的智能驾驶可视化界面,如果他们进一步观察,会发现画风和显示的内容与过去略有一些不同。只不过到了城市 NOA 阶段,画面上每一个东西都是 BEV 感知架构看到之后“画”出来的。

这样的数据量对工程师来说还不太够,所以他们又设计了专门的工程模式界面。这个极其炫酷的界面以更精确的形式,显示理想 AD MAX 系统看到了什么、将会做什么。在我看来,这个界面一定要用“极客模式”或其它什么炫酷的名字,加以包装后,留给理想的消费者;它的一键录制、一键上报功能也会很有用。
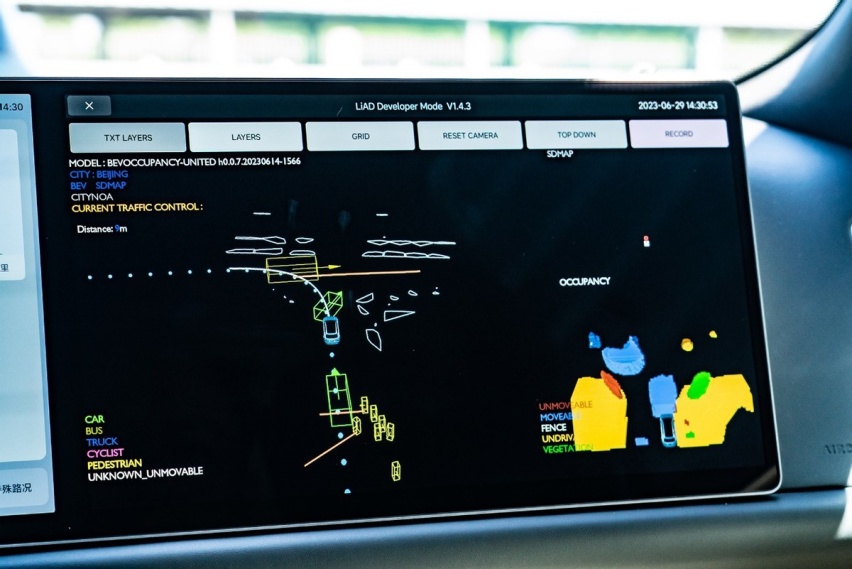
左侧显示了系统的一些基本信息,比如它用的是导航级 SD Map(区别于HD Map 也就是高精地图),已经实现 BEV 感知架构与占用网络的融合。左下角则是它对世界的基本认识,在城市 NOA 眼中,这个世界是由小汽车、客车、货车、自行车/摩托车、行人和通用障碍物构成的。图中蓝点组成的线是本车行驶轨迹,橙线则是系统预判其它道路使用者未来 5s 的行动路径。

旁边一角是占用网络的界面,这个模型将世界划分成不可动物体、可动物体、护栏/围栏/墙体、不可通行路面与植被几大项。这个如同乐高积木一般的颗粒世界,是今天工程师解决城市甚至非铺装路面高级辅助驾驶问题的工具。据说,如果植被覆盖面积较小,理想的占用网络会临时将植被划入可通行路面。

所幸,哪怕是我们刚开始的通勤 NOA 体验,也没遇到过这种尴尬场景。我们从类似乡村土路的地方出发,一直开到望京的城市区域,经过乡道、施工路、CBD 等几个场景,也遇到了无保护左转、急转汇入主路、识别红绿灯、与车辆/摩托/电动车/老头乐/行人等博弈的各种情况。城市 NOA 在上述路面表现得平稳、顺滑。

最重要的是,它没有一些同类系统表现出的强烈“机械感”,像是一个真人在开车。有这种“机械感”的同类系统,推理和解决意外的能力还不是很强,在遇到路边违停、插队等意外场景的时候,它可能跟在违停车后无穷尽地等下去,而不会想着绕一下提升通行效率。这就仿佛整套系统由大量规则“编织”起来一样。

城市 NOA 的工程版是另一个样子。这类由模型和数据自己迭代出来的算法,像人一样能积累经验、很快成长,所以在遇到违停车、无标线路面、与其它车辆博弈,又或者红绿灯被大型车辆遮挡而看不见的场景,它不会跟着某种定死的行动逻辑去控制车辆。城市 NOA 的某些操作,像一位初出茅庐的人类驾驶员,你可以感受到算法背后,海量训练数据中体现的“人类逻辑”。

不过更强的系统能力,除了让功能更好用以外,也考验人与车之间的互动方式。整个驾驶过程中,我统计到 8 次人为接管:
1、无标线狭窄路面绕行违停大车;
2、路口内主动规避过于靠近的车辆;
3、转弯时手施加给方向盘的力量过大;
4、误触刹车;
5、与行人博弈时距离突破心理阈值;
6、系统漏检红灯;
7、通过路口的时机突破心理阈值;
8、绕行违停车辆时两车距离突破心理阈值。
当中固然有占用网络的空间判断精度、BEV 感知架构抗干扰能力需要打磨的因素,不过多数时候,反而是驾驶员自身对系统能力边界的认识,在影响系统的发挥。系统在进步,人对系统的认识也要有提升才行。

算力、算法和数据,是每一个有志于实现城市导航辅助驾驶的企业都要解决的问题。算力有芯片,算法框架一致,剩下的便是数据积累和持续迭代,而这恰好是理想的优势所在。等到今年下半年推送城市 NOA 的时候,量产版的系统或许能比我们体验的更接近人类驾驶,这类系统的价值才能真正发挥出来。

这么大的汽车市场,容不下脱离平庸趣味的车?

阿维塔终于出了一款走量接地气的车型阿维塔06,年轻人的智美豪华运动轿车。售价20.99万-27.99万。2款增程3款纯电动。

5.广汽本田P7携200kW后驱/350kW四驱杀入市场,90kWh电池包+650km续航,Honda SENSING 360+智驾加持,能否撼动新势力地位?

一口价后,迈腾性价比出来了

真正的有钱人,总想体验一些很特别的东西,比如上太空,也比如把最顶尖的赛车开到大马路上。后者,玛莎拉蒂可以满足他们。

开大型 SUV 出门,最怕窄路掉头、地库转弯?传统大型 SUV 超 5 米车身带来的大转弯半径,让驾驶者常常需反复倒车、小心翼翼,剐蹭风险也随之增加。“转弯半径”,早已成为选购大型 SUV时不容忽视的关键参数。

作为2024年15-20万级中型车销量排行榜第一的车型,上汽大众帕萨特家族的表现依然不辱中高级轿车的名号。而随着全新上汽大众帕萨特Pro的出现之后,限时18.99万元的起售价格,相比于同级别其它竞争对手来说也是诚意满满,并且新车在智能化和高级感方面也有了大幅度的提升。所以当你预算......

挤干水分!铂智3X极限续航实测,纯电续航打几折?

小鹏全新G9,自动辅助驾驶表现如何

长安第三代CS55 PLUS,限时6.59万起,一箱油跑1092公里

售17.98万起 对标小鹏G6 红旗天工06在同级中有优势吗?

2025款问界M9升级了不少东西,那这些升级点体验怎么样,这期视频给你一一解答。

百万星光,共赴闪耀之旅

又“被聚焦”,小米汽车的“5月坎”

意式奢华,是对工艺与设计的极致追求,在玛莎拉蒂GT2 Stradale与MC20 Icona上可见一斑。 GT2 Stradale作为MC20高性能版,车内1/914的标识标志着全球限量914台,灵感源于赛事原型车。 雕塑般的车身线条,搭配大量空气动力学套件,如新增的进气口与......

作为广汽丰田“研发自立化”的首款产品,铂智3X传承丰田的造车理念,堪称智能纯电性价比之王,给中国消费者带来合资2.0时代的诚意之作。

我们走访了长安经销商门店。目前店内对于启源Q05这款车,给到了3000元的现金优惠,以及2年0息的金融方案。

岚图知音配备了5C超充,在理想的超充桩测试充电速度,驾车前往中国航天博物馆,体验高速路的NOA智能辅助驾驶,在博物馆看到了航天飞船的实物。

颜值不低 增程版中大型轿车 东风风行星海S7应该怎么选?

国产新能源MPV全面突破:三款豪华车型的深度剖析











































 京公网安备 11010102004670号
京公网安备 11010102004670号