
你花大价钱买来的激光雷达,真的有用吗?
很多新势力都把自己新车型上的激光雷达当做卖点,从早起的卷激光雷达数量、安放位置,再到现在卷激光雷达的性能,激光雷达这条赛道看上去一片光明,可是安装在车上的激光雷达,真的发挥作用了吗?或者说这种单个成本极高的硬件,车企们真的能发挥出它的价值吗?

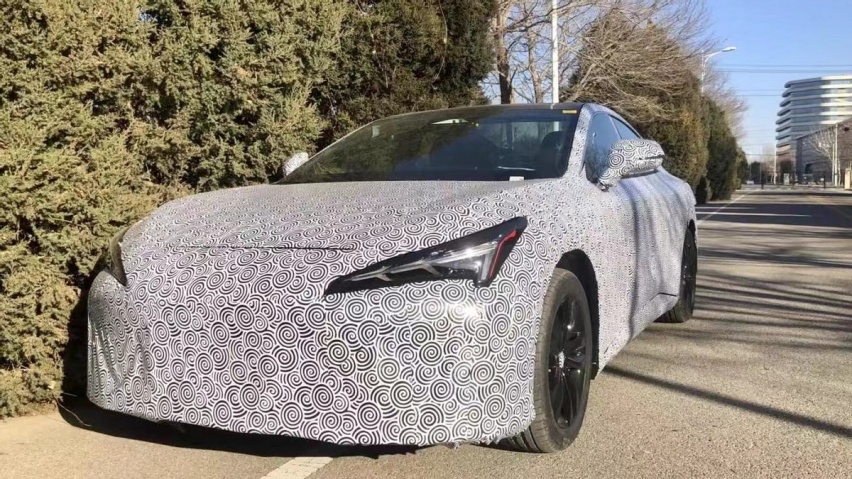
最近曝光了极狐旗下全新轿车N51(内部代号)的专利图,以及测试车谍照,这台车型的定位预计会略低于极狐阿尔法S车型,而专利图中的激光雷达还是非常惹人注意的,极狐目前旗下搭载有激光雷达的量产车型,只有极狐阿尔法S华为HI版车型,而从这套新车曝光的路试谍照中,我们已经看到了方向盘上有华为HI的标志。预计这台极狐的新车也会搭载和问界M5高阶智驾版一样的华为辅助驾驶软硬件。

华为目前这套ADS 2.0系统,采用了1颗速腾聚创激光雷达,并且放置在车顶的位置,不仅不再像之前一样用3颗激光雷达,而且甚至我们从这台极狐全新轿车的谍照中,看到了没有搭载激光雷达的版本,但一样有华为HI的标志,华为在辅助驾驶方面确实是开始了削减硬件的操作,激光雷达数量被减少,甚至有可能会被完全去掉。
而还在加速落地辅助驾驶的小鹏,也开始对于激光雷达有了新的看法,小鹏汽车自动驾驶中心算法专家刘德浩近期表示,会加速小鹏XNGP的布局,将不依赖高精度地图,不重度依赖激光雷达,另外还有像算力、传感器、域控制器方面的升级,小鹏可能也是目前国内新势力中,第一个说不重度依赖激光雷达的车企。

目前全行业内,已经几乎没有车企再去卷激光雷达的个数,像搭载3颗及以上的车型本来就不多,而真正量产的就更少了,车企们在激光雷达这里基本上已经都回归了理性,使用1颗的基本上都放在车顶,而2颗的大多布置在前灯组附近,虽然单颗激光雷达的成本基本上已经都跌到了万元以内,甚至5000元左右就有不错的产品,但是激光雷达依然是车上很贵的单类硬件。
对于成本比较敏感的车企,或者还有心去打价格战,想去抢占市场的车企,在激光雷达这种硬件上做减法,变得很有必要。

目前全行业的高阶辅助驾驶基本上已经都切换了架构,头部车企大多用上了BEV+Transformer的架构,同时再配合各种空间网络技术,以及AI人工智能大模型等,其实对于激光雷达数据的需求,已经在逐渐降低了。
目前新势力们大多使用多传感器融合的方案,采用摄像头与激光雷达相结合,通过多种工作原理提升感知精度,能够在某一硬件失效,或者感知不准确时,起到冗余的安全防护作用。但多传感器方案中,不同工作原理下,传感器收集到的数据类型、所处坐标系都不同,摄像头收集到的视觉数据属于2D图像空间,激光雷达获得的点云数据属于3D空间,处理与融合这些数据并筛选出有用的信息。

不过这一阶段大家普遍采用的是后融合方式,也就是视觉和雷达传感器的数据要各自处理,两边在前期各干各的,互不干涉,在最后把目标数据融合到一个坐标系内,再由系统进行决策,这种方式成本高,需要耗费很多算力,同时在最后容易出现感知优先级判断失误的问题。
而车企们现在开始使用中融合方案,也就是特征融合,不同感知系统经过数据特征提取,而后就进行特征汇总,神经网络会对特征数据进行筛选,再结合BEV视角特征,最后输出BEV视角下的全景图像,再进行决策,这种方式就不再需要很高的算力,步骤也会变得更少,同时在加入Transformer网络后,可以输出3D视角的图像。
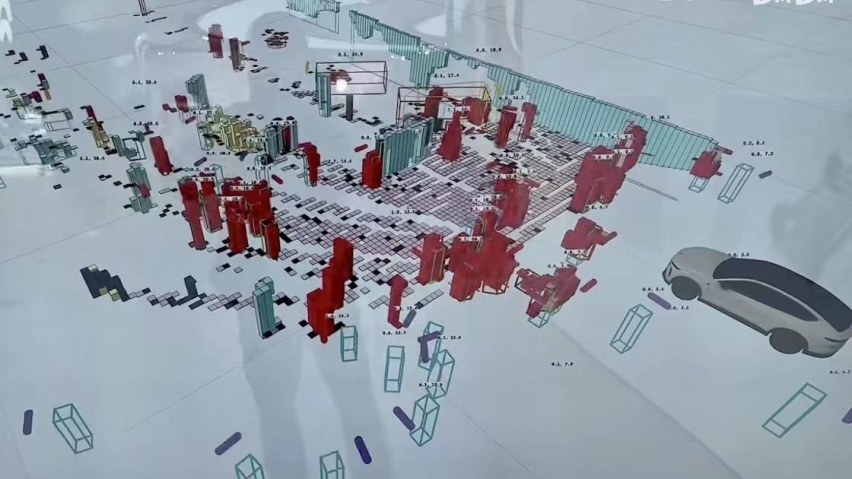
这套方案之前是特斯拉FSD的拿手好戏,从去年开始国内新势力们也纷纷用上了BEV+Transformer或者占用网络,而且特斯拉需要纯靠视觉算法去生硬地不讲道理地实现2D变3D,而新势力们会借助激光雷达的3D点云,再经过融合后,形成类似的3D效果,而激光雷达的3D点云就是用来弥补视觉算法方面的不足,具体的效果我们已经在蔚来和理想辅助驾驶的工程界面展示上见到了。

可以说在后融合时代,激光雷达所提供的数据帮助已经不多,而且长期靠激光雷达的点云数据,来实现3D视角也不是长久之计,虽然理论上来说会比特斯拉的纯视觉2D变3D更准确,但是真的不如特斯拉的成本低,用更高成本实现同样效果,最终还是需要消费者来承担这部分的成本。

而在如今这个人工智能大爆发的时期,辅助驾驶的感知能力,可能变得不再那么重要,甚至是单车的算力也不一定需要很高,在生成式AI大模型的帮助下,车企训练自动驾驶的成本会大幅降低,同时进化速度又会有大提速,如果再用上新的端到端架构,那么自动驾驶的迭代速度,以及决策执行模式都会有飞跃式的进步。
特斯拉一直都没在量产车上用上激光雷达和高精地图,还把全部雷达传感器都拿掉了,这也就逼着特斯拉要去死磕视觉感知算法,所以才会有BEV、占用网络这些新技术的快速部署,甚至端到端的输出模式已经不需要人去理解AI的决策方式。

国内新势力们靠着高精地图和激光雷达迅速追了上来,而且大家也清楚这两根拐杖的利弊,明白不能长期依靠它们,在车企们对于不依赖激光雷达达成了公示之后,下一个要去研究的就是在激光雷达方面做减法,在整体的辅助驾驶或者自动驾驶的技术方案上,全行业确实都在或多或少的模仿特斯拉FSD,而且是越学越像,特斯拉自己也清楚这一点,而马斯克之前也多次表示,要开放FSD的技术专利给全行业,如果这一天真的很快来临,使用原生态FSD系统打造的新系统,可能会在短期内崛起,并冲击蔚小理们这么多年烧钱的成果。

最后,我们还得回到老生常谈的成本问题上,特斯拉HW3.0的全套硬件成本大概在1万元,其中8颗130万像素摄像头的成本可能不会超过1千元,而头部新势力们目前所使用的这些硬件成本,大多在4万-7万元间,华为HI的3颗激光雷达方案,成本可能会更高。这个比较好算,大家去看看一些高度智能化车型的配置差异,就能大概知道辅助驾驶的硬件成本大概是多少,而在现行规则下,1万成本和7万成本做出来的功能没有本质区别,而这个7万块钱中占比最大的就是激光雷达的成本,那么车企接下来会怎么做,已经非常明显了。

在宝马的新世代产品将重新定义智能驾驶:不仅仅追求单一的智驾辅助能力,而是致力于打造交互、操控、驾驶辅助的整体性智能驾驶解决方案,重新定义智能驾趣新纪元。

2025大发指南:快3的计划必中十大技巧【快3全面计划规律技巧】【A͙ M͙ 8͙ 9͓̽ 8͙ 點 C͙ C͙】【6͓̽ 6͓̽ H̟ F̟ 點 C̟ C̟】【精准计划】【全网第一】我终于相信,每一条走上来的路,都有它不得不那样跋涉的理由

高价驾驶辅助到底在行方便还是在添乱

现代汽车N品牌加速推动中国高性能汽车文化发展

7月22日,郑州日产以 “硬派基因 智驭未来” 为主题举办越野技术品牌发布会,全新越野技术品牌“ZNA LAB”正式亮相。该品牌整合了动力、底盘、智能、安全四大领域的技术资源,构建起完整的越野技术体系,让越野体验在各种场景下都能实现升级。依托技术创新与扎实的硬核实力,为驾驶者提供......

大折叠屏手机重量只有220g左右,厚度比直板手机还要薄。那么,极致轻薄的折叠屏手机,性能会缩水吗?用荣耀Magic V5玩了主流游戏,体验出乎我的意料。

当螺旋桨划破天际,低空革命已然启幕!7 月 22 日,峰飞航空科技交付的 V2000CG 凯瑞鸥,携全球首个吨级以上 eVTOL “适航三证” 而来。这架纯电 “空中卡车”,以 2 吨最大起飞重量、400 公斤商载,重塑空中运输边界,4 万公里安全飞行轨迹见证中国智造实力。

儿童手表在唯品会大卖,它为啥成家长的心头好?

当全球电视行业陷入存量博弈的焦虑时,TCL电视凭借“中高端+大屏化”战略的深入实施,用业绩与销量的双增长实现破局。7月22日,TCL电子发布上半年业绩预告和TV销量数据:上半年净利润预计大涨45%-65%,全球TV出货量以1346万台稳居世界第二。

全栈华为乾崑赋能猛士M817 开启智能越野新时代

奥克斯空调正在加速冲刺IPO。

高端显示技术,暗潮汹涌。

ZNA LAB的发布,是郑州日产对新时代越野需求的系统性回答。

骁龙8 Elite玩游戏怎么样?一文揭晓终极答案
朴赛AI服务器引爆WAIC 2025:场景化算力是智能时代的“水电煤”

14600KF性能暴涨36%!玩家实测IPO黑科技,这提升太离谱了

2025年夏季,空调行业正经历政策与自然的双重“热浪”冲击。财政部第三批国补资金690亿元在7月下达,全年以旧换新补贴总额高达3000亿元,覆盖时间延长至全年,且单用户空调补贴上限从1台增至3台,最高单台补贴2000元。与此同时,全国多地遭遇极端高温侵袭,7月黄淮、江南等地最高气......

为性能而来,OPPO 发布越级性能先锋K13 Turbo系列

亲身体验帮你踩坑:百元妙控折叠键盘能不能买?

背板像是被晨雾洗过的嫩叶,光线扫过时泛起细腻的波纹,指尖触碰时却传来丝绸浸过山泉般的微凉丝滑。这可不是普通玻璃,而是vivo独创的“云阶玻璃”工艺,玻璃表面自然生长出晶体层,视觉清爽、触感高级。





































 京公网安备 11010102004670号
京公网安备 11010102004670号