
上海车展前,车企们都急了。2025年只过了四分之一,有关高阶智驾的发布会就至少办了6次,光是3月18日这天,奇瑞、极氪和广汽,都高调发布了各自的技术细节和量产规划,理想汽车只在官方平台推送了MindVLA的技术思考和进展,从里面挑个典型来聊,比如,在极氪千里浩瀚架构中,G-AES能在120kph对路面通用障碍物(宽和高不超40cm、60cm)作出连续避让,而且还不挑光环境,说白了,这其实就是大家熟悉的AEB,在有激光雷达加持、车端算力普遍高于500TOPS(高阶智驾)的今天,技术层面打通这个功能并不难,但问题就在于,以目前主流技术方案来看,AEB的上限还能涨到多少?奇瑞广汽也强调智驾安全,那感知硬件上还能升级什么?

感知硬件性能越强,AEB就越难失效?
还记得2年前,余承东和何小鹏曾针对AEB引发的口水仗吗?余承东觉得应该提高AEB刹停速度,避免因驾驶员注意力不集中或路况复杂造成的事故,何小鹏认为大多数情况下,AEB都不应该超过60km/h,如果因速度过高出现无刹车问题,会给驾乘人员带来惊吓,从车主使用的维度看,他们说的都对,但站到不同的技术路线上看,华为方案更倾向于动态的“停”,而小鹏方案更倾向于静态的“避”。

2年后再看,现在市场主流的AEB方案,思路大多都更靠近前者,即运动状态下紧急刹停,而非低速主动避让,从之前问界M5的50km/h,到问界M7的90km/h,改款后再到120km/h,理想、长安、阿维塔、深蓝都实现了120km/h,去年小米SU7也升级到了135km/h,小鹏G6和问界M9甚至扩大到了150km/h,这次极氪的G-AES,底层逻辑很像是早期华为和小鹏的技术取向结合体,120km/h运动下能连续紧急制动+避让,一边变道,一边刹停,这套首发的技术,让极氪提高了对高阶智驾的安全信心,新的思考是,这套方案很难落地吗?

回答这个问题,得先弄清AEB刹停时速主要取决什么,以及车辆如何去做横向运动。首先,决定AEB刹停时速的核心,就是其自身的系统设计,技术规格的差异,会支持不同的速度限制,而这套系统背后的先决条件,是传感器的性能。由于AEB系统是依赖车身外部传感器通过检测是否存在障碍物,进而来进行相应的紧急制动机制。

所以,传感器的探测距离、精度、分辨率和数据传递效率,都会直接影响AEB系统识别最大速度的准确性,从整个数据分析流程来讲,其次才是决策算法,依据传感器数据采取后续的行为,所以算法的设计和优化,也是能否支持拉高刹停时速上限的一大条件,同时,在高阶智驾的安全机制算法冗余中,结合前向数据对车辆做快速避让执行,也是通过优化算法来完成的。

因此,AEB和感知硬件存在两个关系,一、在无激光雷达的智驾方案体系中,摄像头较高的像素和分辨率,会捕捉更多环境道路细节数据,从而能提高AEB对障碍物的检测准确性和响应速度;二,根据激光雷达实时扫图的本质,点云数据质量同样会影响系统的决策机制,当然,超声波和毫米波雷达的全天候检测,也是同样的道理,所以匹配AEB背后的核心支撑体系,正是整个感知系统数据质量搭建的,可靠的数据会减少误报、漏报降低安全隐患,从智能驾驶整个维度上提高主动安全制动的准确性和及时性。

所以理论上,现阶段或是在接下来,AEB绝不止是能完成紧急转向+紧急制动,刹停时速的上限,肯定会随着感知硬件矩阵性能的提升而被进一步拉大,不出意外,AEB有效刹停时速大概率会是奔着200km/h以内的。那,感知硬件的性能,还能有多大的提升空间?

特斯拉也有两手准备,高阶智驾有4D雷达才安全?
如今,已经有鸿蒙智行、理想、广汽、长安、奇瑞、极氪等主机厂,以及包括文远、Momenta在内的主流智驾企业披露了L3、L4自动驾驶技术基座,最先亮相的尊界S800,华为给出的L3架构方案,就是堆高感知硬件数量和性能,基于车顶的192线激光雷达之外,车侧和尾部共增加了3颗短焦线激光雷达,算上2颗后向角毫米波雷达,全车传感器总数达到了32颗,奇瑞猎鹰智驾H900和极氪千里浩瀚的H9架构,也增加了对激光雷达(含dTof雷达)的依赖,目的都是通过利用新雷达的短线扫描,补齐车身四周的环境数据密度,进而来最大程度的作出极限操作,比如华为和极氪,都已预埋了机器手臂充电技术。

除了激光雷达颗数的增加,超声波雷达在整个智驾等级中,主流方案需要12枚,根据车端算力的不同,智驾能力越强的版本,对摄像头和毫米波雷达的使用策略则不同,作为主要弥补数据坐标的核心部件,3D毫米波雷达其实也是能够拔高AEB性能的硬件之一,对应的,是能拉高高阶智驾的主动安全底线,而严格意义上来讲,还能促使整个系统进步的,其实是4D毫米波雷达,为何这么说?

作为一种基于超声波和激光雷达技术的新型传感器,4D成像雷达相较传统3D效果雷达,能实现更高的分辨率和更广的覆盖范围,能在三维空间生成物体坐标或运动轨迹等重要数据,甚至还能感知环境温度,最关键的,是普通毫米波雷达无法感知高度信息(无垂直角度分辨率),虽然能监测识别大量障碍物,但在静态波杂过滤的过程中,会存在将危险目标过滤的风险,而4D成像雷达就是通过高分辨率点云能增加对环境映射和场景理解,角分辨率甚至可以提升到1度以内,这几乎就是等效低线束激光雷达的效果。
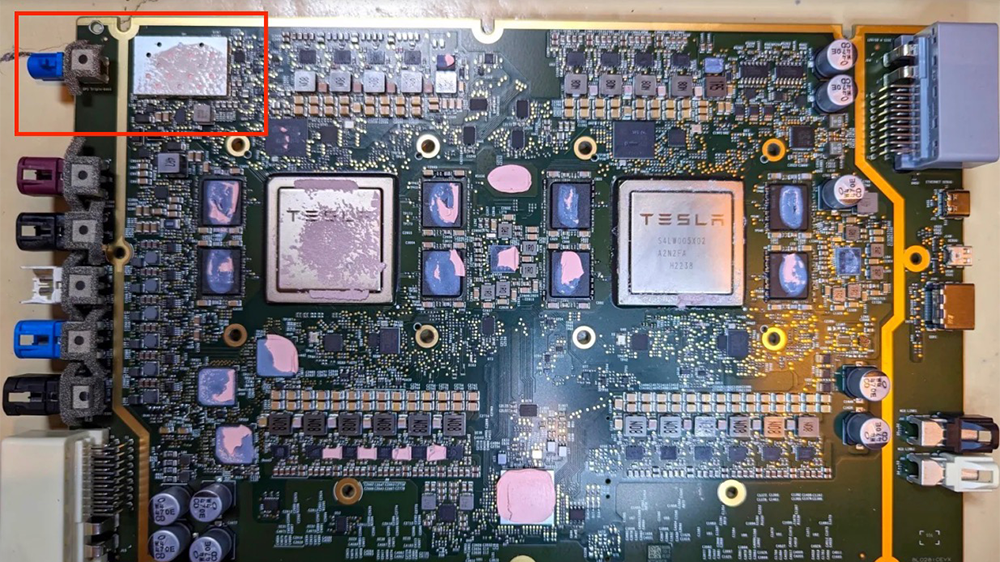
但,目前搭配4D毫米波雷达的智驾车型不算多,华为乾崑智驾ADS也只在部分车型上应用,即便是坚定纯视觉智驾的特斯拉,其在HW4.0控制域上,也预留了4D成像雷达的接口和组件,这让外界曾一度怀疑特斯拉又要启用4D毫米波雷达,明明成本只有激光雷达的一半,侦测性能还能追平低线激光雷达,这不仅能保证AEB的效果,也能拉高智驾的极限功能细节,为何车企没有批量采用?简单概括,是大多处理器无法完全满足毫米波雷达体系,数据较大吞吐量的需求。
毕竟,超声波雷达和毫米波雷达表面上都属于感知雷达的一部分,但两个不同物理性质的雷达体系,很容易产生信号相互干扰,进而影响侦测稳定性和准确性,解决干扰的思路之一,是将多频率窄带信号合成宽带信号,也可以是直接从供应链下手,但这需要采购包括解码处理器完整的硬件方案,由于4D雷达侦测感知范围偏强,会产生较大的数据层次,这在某种程度上又会给智驾进程产生黑盒方案,所以严格意义上讲,真正能左右高阶智驾安全冗余的,不是算法或算力储备,而是在获取环境数据的能力上,但有这枚雷达的加持,车辆的主动安全必然会再上一个台阶的。

OMEN暗影精灵 11 游戏笔记本(后简称暗影精灵11)可以说是近期关注度比较高的游戏本,硬件规格主流,性能释放不低,关键是价格太香了,国补后RTX 5060版本最低也就6000多一点,RTX 5070版本国补后最低甚至低于7000元,性价比放在一线品牌中十分突出。今天我拿到了暗......

容声冰箱携“寻鲜之旅”养鲜答卷鲜耀南博会!
日前,多个招聘平台的招聘信息显示,潮玩巨头泡泡玛特正在招募小家电研发工程师、工业设计师等专业人才,月薪在1.5万-2.5万元,岗位职责明确指向复古小冰箱、咖啡机、早餐机的开发流程,甚至要求十年以上家电行业经验。这家以盲盒玩偶风靡全球的企业,正在向一个看似毫不相干的领域伸出触角——......
日前,2025高通汽车技术与合作峰会在苏州盛大举行,此次峰会上,高通携手广大主机厂、供应商,展示了骁龙座舱平台至尊版、Snapdragon Ride平台至尊版等汽车平台,以及落地方案,展示了基于舱驾融合理念下的汽车智能新体验

全球高端电视市场的竞争格局,正迎来中韩巨头深度较量的关键时期。一边是以三星、LG为代表的韩国巨头,凭借深厚的显示技术底蕴和品牌积淀强势布局;另一边则是以TCL、海信为首的中国军团,以极具性价比的创新技术与灵活策略发起冲击。这场交锋的核心焦点,已鲜明地聚焦于新型显示技术路线的争夺:......

颠覆传统豪华:阿维塔06带来的不只是变革

挂耳式耳机什么牌子好?怎么选?开放式耳机测评推荐

日前,2025高通汽车技术与合作峰会在苏州盛大举行,现场,除了有高通汽车平台硬核展示之外,还云集了汽车领域的诸多大佬,留下了不少精彩瞬间

单导华夫格T恤和亨利POLO衫,物理速干+防晒抗静电到底有多强?

华为智驾灵魂人物空降,吉利迎来iPhone时刻

在生物柴油上涨的推动下,相关上市公司业绩表现随之修复。

当方盒子遇见摇滚灵魂,iCAR V23以先锋态度助燃苏见信「尽兴而活」成都巡演
“一家在海外市场已经很有知名度的中国电视品牌,利用其现有渠道转做空调,但其净利润率仅为3%。”2025年6月底,深圳“中国企业出海高峰论坛”上,格力电器市场总监朱磊的发言引发关注。
智能驾驶当下的发展方向,一个是从L2级别辅助驾驶向L3级别自动驾驶迈进,另一个就是实现算力硬件的自研,比如说小鹏即将在G7上首发上车的自研图灵AI芯片。哪怕是财务状况一直紧张的蔚来,也在不遗余力推动自研神玑NX9031芯片的发展。

罗姆宣布,与领先的车规芯片企业芯驰科技面向智能座舱联合开发出参考设计“REF68003”。

不知道大家茶余饭后有什么兴趣爱好?机车?钓鱼还是拍照? 对我来说,每天下班之后玩几轮单机游戏,例如《NBA 2K25》、《黑神话·悟空》等等,对于不抽烟、不喝酒的中年男人来说,可以说是为数不多的乐趣。 既然是单机游戏,那就离不开“游戏手柄”,从少年的红白机到如今的Switch......

强到没朋友,指纹加密+100W快充,这款至高8T硬盘盒颠覆我的体验

在新能源汽车技术的激烈角逐中,“打死不做增程” 的呼声背后,是对更优技术方案的探寻。长城汽车的 Hi4 技术应运而生,以破局者之姿,重新定义混动四驱新标准,尤其是在与增程技术的对比中,优势尽显。

比亚迪前段时间兆瓦闪充技术的推出赚足了眼球,很多车企看到后随之发布了自己的高压技术平台,可以看到,比亚迪的确在引领行业发展,但是兆瓦闪充我们目前能够看到哪些瓶颈呢?
森萨塔的 SIM200 绝缘监测设备可检测高压电气系统(如EV充电)中的潜在隔离故障以帮助确保系统安全运行








































 京公网安备 11010102004670号
京公网安备 11010102004670号