
FSD入华已满一个月,技能水平好像不太一样了。
时间拉回一个月前,FSD入华的首个24小时里,主机厂、车主、各路博主扎堆上路直播测试,首轮战果出奇一致,闯红灯、进园区罢工、不按规定道路划线行驶、市区超速甚至逆行,很明显,第一轮较量胜利的天平是更靠近国产智驾阵营的。彼时,马斯克给出的解释是,由于不可抗力因素,中国版本的FSD是基于互联网公开道路数据采集训练的,要这么说,这位外国司机学习和熟悉一段时间的中国交规和道路环境后,之前的问题大概率是可以解决的。
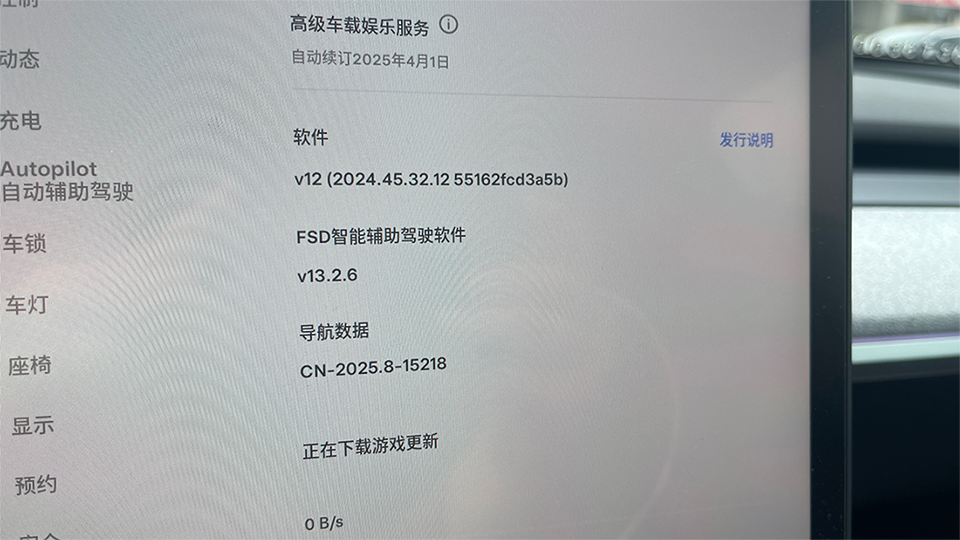
20天后(3月17日),特斯拉向HW4.0车辆推送了FSD限时体验,V13.2.6的系统版本没变,车端软件版本2024.45.32.12,但是从体验的维度上看,已经有不少用户发现,市区左右转明显没有再驶入非机动车道,交通信号指示灯和道路划线也看懂了,但园区、地库依然不稳定,不理解限行路段,不禁要问,在没有升级版本的情况下,FSD真能改进?和头部国产智驾相比,FSD还有什么短板?

决策明显变规矩,FSD隐性升级了?
先抛出一个问题,为什么现在限时体验的V13.2.6,和一个月前的效果不一样?截止到目前,特斯拉中国始终未对FSD入华后的种种表现置评,而就在FSD落地中国后不久,曾有消息称特斯拉已调拨部分AI算法工程师来华做系统性优化,按照马斯克在去年公开场合透露的信息,特斯拉会持续学习优化FSD,部分改进不需要用户去主动升级,车辆在信号条件较强的环境下,会自行覆盖正使用版本的控制参数,比如跟车距离、变道激进程度等,事实上,其实这就是所谓的“隐性升级”。
FSD进入V13版本之后,软件底层架构也同步升级到了2.0,架构支持模型和参数的远程动态更新,不用系统版本升级可以直接部署,换句话说,这次对细节体验的优化,就是因为有了海量的高质量长尾视频实测片段,经过数据蒸馏对本土化障碍物做算法适配,最后小幅优化控制参数,而在这之前,特斯拉就曾对FSD V12版本进行过一次参数热修复,改进了在特定地区道路规则的临时调整策略,修复了因为天气或光线导致的感知系统误识别问题,所以从某种程度上讲,FSD来中国这30多天,首轮实测训练结果已经出来了。
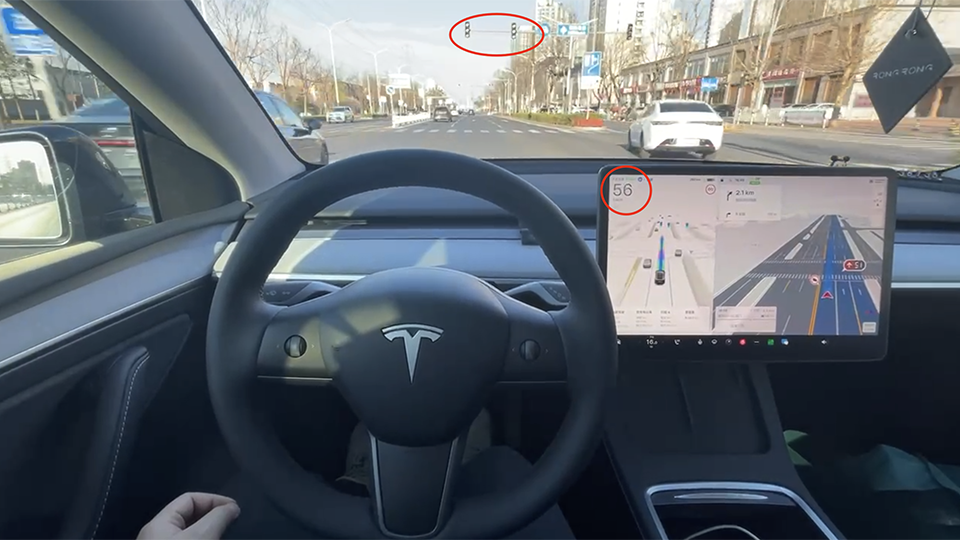
改进优化的点,还包括了更柔和的制动、较早的变道机制、加塞丝滑,重点来讲依然存在的几个问题。首先,相较于早期效果,限时体验的FSD版本,闯红灯几乎没有再发生,但百度地图提供的红绿灯倒计时数据信息,FSD似乎并没完全参考,比如,极限闯黄灯就时有发生,信号灯在已切换为黄灯时,FSD并没有让速的打算,而是以匀速或小幅提速驶过路口,这其实是存在安全隐患的,不过,结合40多公里的北京晚高峰市区实测体验来看,绿灯尚有10秒左右结束,且前方无跟车的条件下,FSD又可以准确识别到,并且在道路划线内稳稳刹停,不出意外,黄灯问题会是接下来FSD小幅改进的内容。

第二个问题是园区、地库等场地,FSD表现依然不稳定。通过闸机基本没太大难度,但老旧小区门口数量较多的减速带,会让本就低速段行驶的FSD突然停下来,在经过较长时间的“思考”和反应后,不提示接管也不降级,但出于通勤效率考虑,还是需要人为补一脚电门催促其驶离;由于目前FSD不支持D2D功能,但可以进入商超地库,然而这也需要事先规划好目的地信息,到达导航终点后FSD会自行退出,并不会完成高阶智驾最后一公里的泊车问题,相比华为、小鹏、理想等,这部分体验明显代差较大。

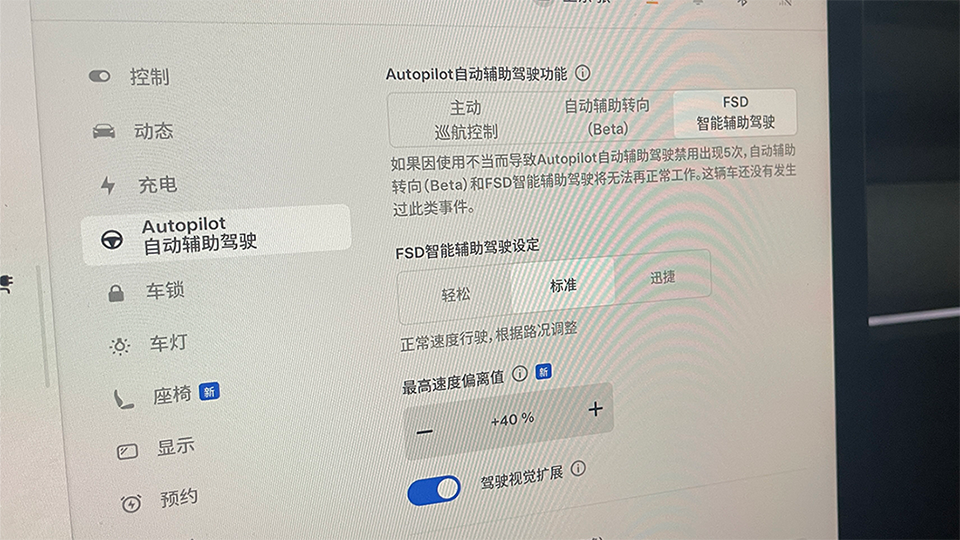
第三个问题是不能很好理解限行路段,主要是指潮汐车道和公交车道。目前V13.2.6的决策逻辑,多是以跟车为主,即便是在变道频率最高的“敏捷”,在限行时间之外,只要无车行驶,FSD便会一直跟进前车,变道超车通勤效率同样不稳定。目前,主流国产高阶智驾,感知融合架构已经可以读取并理解限行指示牌的内容信息。话说回来,目前存在的几个问题中,有一多半都和理解有关,按照FSD的算法优化逻辑,针对这部分特定场景或指示牌继续做高质量训练,解决起来难度并不大,而真正的难点,或者说,和国产智驾拉开距离的地方,其实并不在市区高速领航,而是聚焦在地下,在智驾最后一公里泊车这个环节上。
FSD大概率跟进VPD,但不如国产智驾安全?
从今年开始,配备雷达传感器的主流高阶智驾,VPD、D2D等开始大量上车,其中VPD代客泊车商用最快会在今年开展,具体的功能大家基本都清楚了,重点在机场等场地,车主可以在出发层下车,让车辆自行前往停车场完成泊车,同理,车辆也支持在到达层完成接驾,从某种程度上讲,这个功能其实就是自动驾驶的其中的一项功能,新的思考是,FSD会部署吗?目前,FSD仅支持ASS无人召唤功能,不过,和主流国产智驾技术相比,特斯拉移动端不支持实时路面显示,且需要手动长按召回按键,最核心的,是在地库等信号环境较差的场地无法激活使用。

也就是说,即便FSD打通了自由车位到自由车位的泊车功能,但HW4.0在数字信号上并没完善5G网络,这意味着,跨层漫游自主泊车,大概率只能在小部分场地实现,这方面,显然又和国产智驾技术有较大的距离。可能有人会搬出FSD AI学习的理论,本质上讲,只要是端到端技术,能实现的功能就是和投喂质量和训练量直接挂钩的,所以FSD部署VPD,大概率会是时间上的问题,不过,这就又会产生一个新的疑问,效果够好吗?

在无人泊车的整个过程中,存在停车场会车、礼让、窄路掉头、跨层漫游、避开障碍物等挑战,站到整车和行驶安全的角度上看,这部分其实考验的是感知融合架构的探测精度,这意味着,感知架构不光要在地面上看得远,看得清,来到地下车库还要看得准,在华为的L3架构中,车辆新增加了DTOF短线固态激光雷达、4D角毫米波雷达以及车外麦克风,至于这两颗新雷达的性能,之前我们已经分析过,前者主打车侧短距离探测,后者可以获取高度信息,全车超过30颗感知传感器,最小的探测精度可以做到厘米级。

在极越之后,小鹏汽车是目前国内唯一选择全系无激光雷达的纯视觉智驾路线,但和特斯拉比起来,依然没有省略掉超声波雷达和毫米波雷达,目的也很明确,就是利用雷达传感器的特性提高感知数据丰富程度,带来智驾安全冗余,在度过靠记忆完成跨层漫游泊车之后,今年图灵AI智驾会落地无导航记忆的园区漫游,理论上,地面部分的漫游泊车,FSD也能跟上,但没有高精度雷达来辅助标定环境数据,可以说即便打通跨层无人漫游泊车,也大概率只能走记忆的路线,至于安全可靠性,届时这又会是下一个话题。

公司全年实现营业收入615.37亿元,归属于上市公司股东净利润53.33亿元,同比增长17.93%。公司拟实施每10股派发现金红利14元(含税),现金分红比例达47.86%,分红金额25.52亿元。

看到极氪这么卷黑科技,我就放心了

REDMI 儿童手表体验!九重安全防护、儿童版朋友圈,友商瑟瑟发抖

宝马在研发中心举办了技术创新日活动,让我们一起来看看都有什么新东西?

搭载Hi4-G超级混动系统的长城重卡是全国第一款综合油耗低于30L/100km的重卡,综合油耗仅为29.7L/100km

百元预算买千元音质?西圣Olite2挤地铁也能听出livehouse质感

品类扩充,很有可能会是清洁电器头部品牌的共同选择,因为,或者为了品牌的自我实现,或者为了业绩的第二增长,又或者还有其他种种原因,一些头部品牌已经相继展开了行动,像是石头做了洗衣机品类、科沃斯依托添可做了厨电品类,作为目前线上清洁电器头牌的追觅更有“无界”的愿景,从智能清洁走向全屋......

洗净比这个看似枯燥的数值,实则是将衣物洗涤效果量化为科学语言的密钥。洗净比是指洗衣机洗涤衣物的清洁效果,与标准洗衣机相比的一个比值。通常,洗净比越高,表示洗衣机的清洗效果越好。
双核顶配旗舰科沃斯地宝X9 PRO,1台顶3台!

在春节后二级市场由机器人和DeepSeeK带动的结构性行情中,医药板块也出现了久违的表现,特别是AI医疗概念让在这一方向有所动作的公司受到资金的追捧。但是,中药板块却迟迟没有被资金关注。

最近几年,如果要谈到家电“新物种”,当以厨房为最。厨房空调,在其中是相当具有代表性的一类,毕竟,他们是很可能能让以猛火爆炒为主的中式厨房告别挥汗夏季的最大功臣。

3月27日,华硕无畏Pro14 酷睿版 2025、无畏Pro16 酷睿版 2025及无畏Pro16锐龙版2025正式开售,定位高能AI新选择。此次华硕无畏家族全面焕新,新品延续该系列轻薄简约的外观设计,搭载全新AI处理器,兼顾能效与AI优势。还有亮彩护眼好屏、长寿大电池、高清+红......

陕国投A定增38亿元将有效提升资本充足水平,夯实业务战略转型的资本基础。

不跑长途没必要选三电机?领克900的三套插混技术,最实用的其实是1.5T?

近日,中国领先的金融科技公司小赢科技(XYF.N)发布了2024年第四季度及全年未经审计的财务报告。财报显示,2024财年公司总净营收达59亿元,实现净利润15亿元。值得一提的是,其第四季度营收、净利表现尤为突出,驱动全年业绩“完美收官”。

3月24日,罗姆集团宣布其采用专有的C2路线LiMA生产技术建设的大规模工业化甲基丙烯酸甲酯(MMA)工厂成功投产,该工厂位于美国德克萨斯州贝城。

2024年,中国食品加工行业面临消费需求分化、原材料价格波动及市场竞争加剧等多重挑战。在此背景下,“养牛第一股”福成股份各板块协同效应持续增强,报告期内实现营业收入10.22亿元,归母净利润5169.88万元。同时公司经营活动产生的现金流量净额达1.04亿元,同比大增196.24......
坐上清洁电器线上王座的追觅,正在从智能清洁走向全屋智能。空调,这个作为家电业“定海神针”的品类,是过程中的重要角色。在AWE 2025中国家电及消费电子博览会上,追觅携Z-Wind全嵌式整体机空调与X-Wind双机械臂空调两款空调新品到场,荣获“全球全嵌式整体机空调首创者”和“全......

阿卡西斯与三星9100 Pro联合推出雷电5底座:开启高效拓展新时代

“全民智驾 海洋领航” 比亚迪海洋纵横中国智驾长测活动正式开启




































 京公网安备 11010102004670号
京公网安备 11010102004670号