
一台问界M7的碰撞,撞出了人们对AEB功能的一些思考。
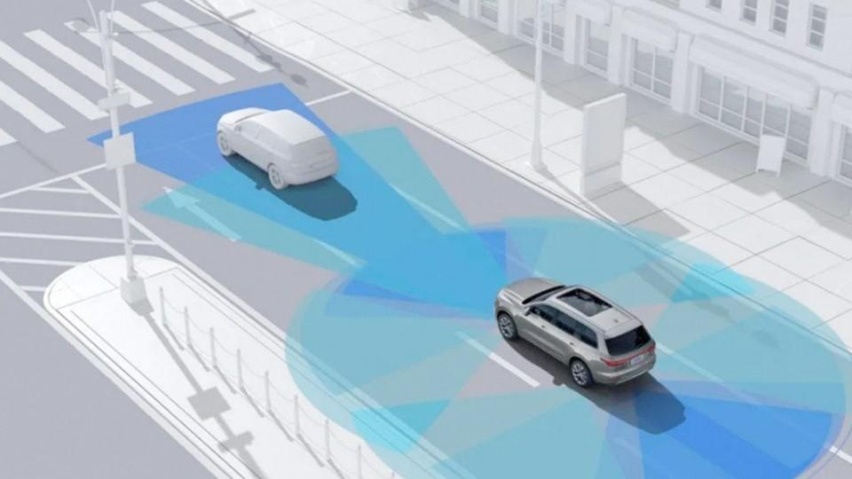
最开始,部分消费者在经过品牌、销售人员宣传之后,对AEB的概念逐渐形成了一个不那么全面的认知,比如开车过程中前方出现了障碍物,即使驾驶员没踩刹车,AEB也会帮助驾驶员完成刹车动作。其实说的直白一些,AEB就是自动紧急制动系统,依托于感知硬件的数据,来感知车身周围的环境情况,如目标距离、速度、大小等,为AEB系统的决策来提供数据支持的。
而之前比较老的车型的AEB功能,是有局限性的,就是在车辆超过某一速度范围之后,就无法激活AEB功能的使用了。于是,就有了开头说的那起事故。有AEB功能,但可能是超过了刹停的速度限制,于是就没能激活这个功能。
但现在随着技术的进步,AEB功能也在不断升级,后续是否能够避免这种情况的发生?
从华为开始,问界M5的AEB刹停时速达到了50km/h,到了问界M7上是90km/h后续改款之后升级到了120km/h的刹停时速,而且都是对静态物体的刹停速度。之后,小米SU7的AEB刹停时速,达到了135km/h的时速。显然,更高的刹停时速,已经成了汽车行业卷AEB功能的一个方向。
那么,AEB刹停时速主要取决于什么?
首先,是系统设计和技术规格。AEB系统的设计和技术规格决定了其能够处理的最大速度范围,不同的系统,可能具有不同的速度限制,这取决于其传感器、控制算法和制动系统的能力。也就是说,技术规格决定了它的性能上限,而后这套系统的核心,就是传感器性能。

由于AEB系统是依赖于传感器来检测前方道路的情况和潜在碰撞危险的,所以,传感器的性能,如探测距离、分辨率和响应速度,将直接影响系统能够识别的最大速度和准确性。这里主要是前向的雷达、摄像头以及激光雷达等。
然后才是决策算法,这是根据传感器提供的信息来判断的后续行为,判断是否需要启动紧急制动。算法的设计和优化,将影响系统在不同速度下的决策准确性和响应速度。然后,最后才是制动系统的操作。
所以现在基本可以清晰的认识到,随着感知设备的升级迭代之后,与刹停最高时速是会有直接影响的。

理论上来讲,感知硬件和AEB的关系:
像素更高的摄像头可以捕捉更多的图像细节,从而提高障碍物检测的准确性和速度;
更准确的检测意味着AEB系统可以更早、更准确地预测可能的碰撞,并提前进行刹车;
使用高像素摄像头会提高AEB的刹停时速,因为它能够更早地识别出障碍物,并且开始启动刹车程序。
当然,与之匹配的AEB系统算法是必须要优化的,才能让整套系统更快的依托于传感器数据做出决策。优化的算法,可以减少误报、漏报的可能性,提高刹车的准确性和及时性。这也是之前小鹏汽车所担心的,如果把刹停时速范围做宽,那么高速域下出现误刹车的情况,对行车安全反而不是一件好事。
现阶段,除了摄像头,还得融合其他类型的传感器数据,如毫米波、超声波、激光雷达等,来提供更全面的环境感知信息。多传感器融合技术可以提高AEB系统的可靠性和稳定性,提高了在复杂环境下工作的准确性。

现阶段的AEB功能,大部分都会配合着高阶的辅助驾驶来一起使用,所以它的刹停时速的上限,也被拉高了。例如,小米SU7的AEB刹停时速,已经做到了最高135km/h的时速,而这就是要和智能驾驶功能,配合使用,才可以做到高时速的AEB刹停功能。
为什么说,高阶智能驾驶配合AEB,能做到更高的刹停速度?
首先要理解,高阶智能驾驶所谓的高阶,是什么。这里可以理解为它的功能和配置都更好,相对于只有AEB功能的车型来说,有了更高清的摄像头,有了测距更长的激光雷达,而此时在普通的AEB配置上作为主要核心收集数据使用的毫米波雷达、超声波雷达、低像素摄像头等配置,都变成了“辅助”配置。
归根结底,一个前提条件,就是有高阶辅助驾驶功能的做融合感知更强。

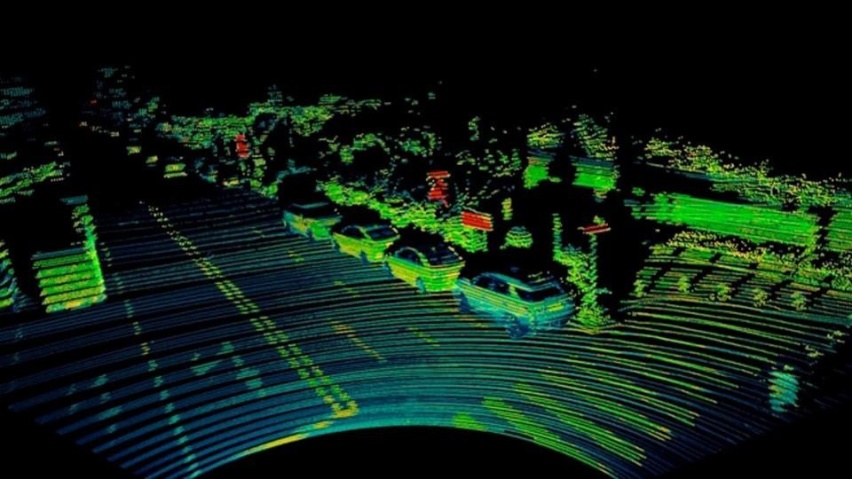
从传感器特性说起,激光雷达现在又探测距离150米、200米左右的产品,原理是通过发射激光并测量反射回来的时间来精确计算距离和速度,对三维空间的感知能力强,不受光线影响。但弱点就是对远距离的探测,有一定局限性。而摄像头的特性,是依靠视觉识别技术来解析图像,成本低,而且探测距离比激光雷达远,但会受到光线、天气因素的影响更大一些。
所以,更好的AEB功能是要做数据融合的。
现阶段车辆安全系统中,激光雷达和摄像头的数据通常会被融合使用,可以提高感知的准确性和可靠性。然后,数据融合算法会综合两种传感器的信息,来做出更全面的环境感知结果。再到决策层,在AEB的决策过程中,没有明确的“决策权”分配给激光雷达或摄像头;而是系统会根据两种传感器提供的数据,以及预设的算法和逻辑,来综合判断是否需要触发紧急制动。所以,有了更高级的感知硬件之后,就会带来更精准的判断信息。

例如,在某些场景下,激光雷达可能因为其精确的测距能力而更具决策影响力,比如在逆光、低光的环境或恶劣天气中。而在其他场景下,如识别行人、车辆类型或交通信号时,摄像头的视觉识别能力可能更为重要。
在有了更好的感知融合之后,高阶辅助驾驶的帮助是什么?
其实在高速域下,AEB的工作前是依靠辅助驾驶功能来减速的,降到AEB的工作范围内,AEB才开始决策是否要刹停车辆,而配备有高阶智能辅助驾驶的车辆,一旦需要AEB做出决策的时候,车速应该已经基本降到了可控范围内。当然,也有像小米SU7一样的AEB策略,可能它的AEB软件算法调的更加灵敏,当然这也需要感知硬件+制动硬件的性能同样出色,才能在高速域下做出准确、快速的反应。
所以,是不是意味着高阶硬件上车之后,AEB的效果就更好?理论上是这么回事,但,再好的硬件,配合不上好的软件算法和策略的话,也等同于不能发挥它们的全部实力。

高价驾驶辅助到底在行方便还是在添乱

在宝马的新世代产品将重新定义智能驾驶:不仅仅追求单一的智驾辅助能力,而是致力于打造交互、操控、驾驶辅助的整体性智能驾驶解决方案,重新定义智能驾趣新纪元。
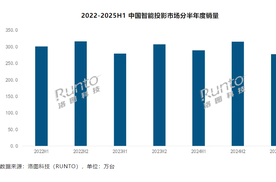
2025年上半年,智能投影并没有像其他3C家电产品一样,在国补政策的拉动下,实现市场的高增,而是进入到“量额双降”的不利境地。

小牛抛出“顶配模板”,能抄完我叫你大师!#小牛电动#小牛NXT#小牛FXT#大师标准#不怕被模仿

R5-3500U和Vega8核显很能打,整机颜值也很在线

雷柏V700DIY-98快银轴背光多模版键盘评测:机械手感的极致追求

当全球电视行业陷入存量博弈的焦虑时,TCL电视凭借“中高端+大屏化”战略的深入实施,用业绩与销量的双增长实现破局。7月22日,TCL电子发布上半年业绩预告和TV销量数据:上半年净利润预计大涨45%-65%,全球TV出货量以1346万台稳居世界第二。
小牛真技术不在彩屏音响!同行颤抖:这怎么跟?#小牛NXT#小牛FXT#大师标准#小牛电动车#新国标电动车

高端显示技术,暗潮汹涌。

骁龙8 Elite玩游戏怎么样?一文揭晓终极答案

AI找片黑科技!问台词直接跳转华为视频,观看《凡人》热血修仙
朴赛AI服务器引爆WAIC 2025:场景化算力是智能时代的“水电煤”

14600KF性能暴涨36%!玩家实测IPO黑科技,这提升太离谱了

2025年夏季,空调行业正经历政策与自然的双重“热浪”冲击。财政部第三批国补资金690亿元在7月下达,全年以旧换新补贴总额高达3000亿元,覆盖时间延长至全年,且单用户空调补贴上限从1台增至3台,最高单台补贴2000元。与此同时,全国多地遭遇极端高温侵袭,7月黄淮、江南等地最高气......

学生党买什么电竞显示器好?上手科睿X3,堪称600元档配置天花板

7月29日,2025年《财富》世界500强榜单揭晓,全球企业竞争格局再度刷新。本次榜单入围门槛提升至322亿美元,印证了全球经济体量的持续扩张。中国企业中,美的、小米、海尔三大家电与科技巨头表现尤为亮眼,以显著的排名跃升和扎实的业绩数据,展现了中国制造的韧性与创新动能。
1w2售价竟下1w血本!网友:这价格能回本吗?#小牛NXT#小牛FXT#小牛电动车#友商看到生死难料#大师标准

605km续航18分钟快充!海狮06EV杀疯了:卷到15万级纯电SUV天花板

14600KF VS 7800X3D:千帧神 U 背后的恶意营销与真实性能

在科技飞速发展的当下,AI 与高性能计算已成为各行业进步的核心动力。影视特效渲染、科研数据模拟、工业设计建模等场景,都对硬件性能提出极高要求。AMD 锐龙 Threadripper PRO 9000 系列处理器的登场,吸引了全球专业用户目光,而安耐美 LIQTECH XTR 幻彩......





































 京公网安备 11010102004670号
京公网安备 11010102004670号