上一期聊的自动驾驶汽车里面的感知模块还是在是上一期。这一期我们说说雷达吧。在说雷达之前首先要感谢各位支持我的朋友们,你们的关注、点赞,在看、转发是我不断开启新的创作的动力与源泉,谢谢你们的支持。
本人不才,出此浅陋之文;若能带给大家哪怕只有一丢丢的技术认知,或者仅仅一观而已,都是我平生之所愿,实乃万幸!部分内容如有不当之处,还望诸位多多批评指正,明某不胜感激!
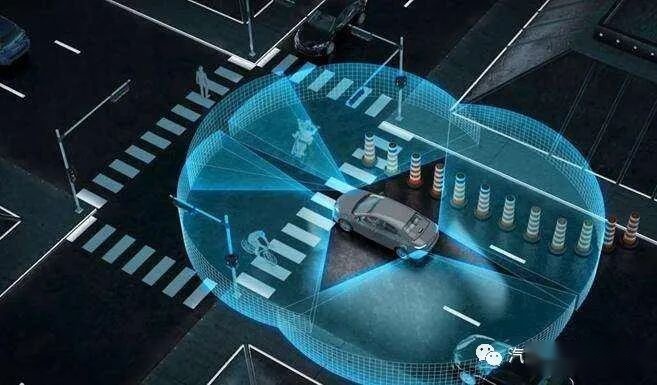
言归正传,上一期我们说到了人们受蝙蝠的启发而发明了雷达。也听到了自动驾驶领域里面的感知系统,其中最重要的当属雷达了,说到雷达其实并不陌生,它始终藏匿于我们生活的N多个角落,大到科学研究、军事装备、气象服务、航空飞机、船只舰舶等,小到我们的出行定位、汽车位置跟踪、导航地图、卫星电视、家居电器等。
为何我们在坐飞机过安检的时候,能在2秒完成检验?从A国发射一枚导弹到B国,为何在5000-6000千米的位置都能采用反导弹进行精准拦截?当一辆汽车在距离前车大约50-100米时能够完成在不需要人为操作的情况下自主刹车?.....
让我们带着这些疑问一起来说说雷达吧!我们先来看看雷达在百度百库上面的定义吧。雷达“是英文Radar的音译,源于radio detection and ranging的缩写,意思为"无线电探测和测距",即用无线电的方法发现目标并测定它们的空间位置。因此,雷达也被称为“无线电定位”。雷达是利用电磁波探测目标的电子设备。雷达发射电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的距离、距离变化率(径向速度)、方位、高度等信息。”

雷达测量速度原理是根据自身和目标之间有相对运动产生的频率多普勒效。其测量距离原理是测量发射脉冲与回波脉冲之间的时间差,因电磁波以光速传播,据此就能换算成雷达与目标的精确距离。

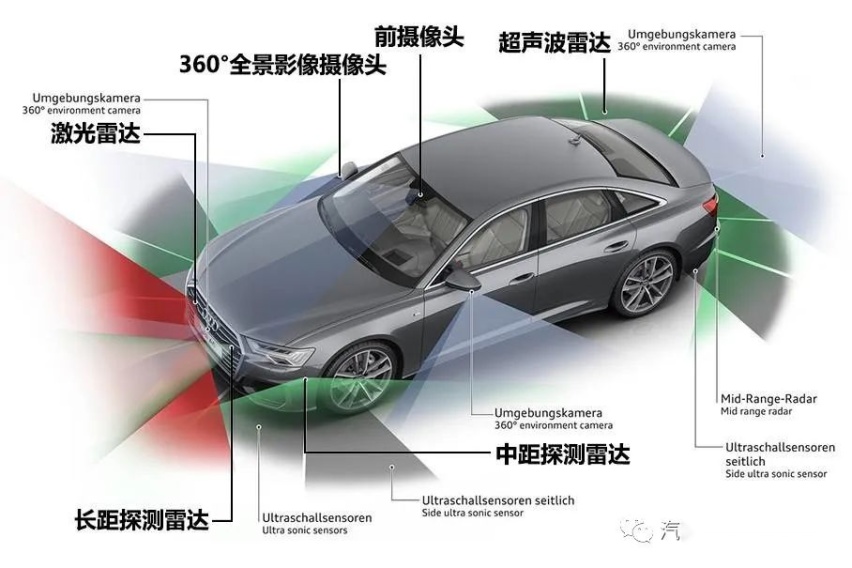
雷达的种类繁多,分类的方法也非常复杂。一般为军用雷达与民用雷达之分。今天我们只说说按雷达频段分,可分为超视距雷达、激光雷达、毫米波雷达以及超声波雷达等。而其中超视距雷达也多用于军事,我们今天姑且说说后面三种,因为它们与自动驾驶有着千丝万缕的关联。主要从定义、分类、原理、优缺点及相关厂家等方面去概括。
| 类型 | 频率 | 性质 | 应用 |
| 激光雷达 | 10-14Hz | 光(电磁波) | ACC/AEB/ALC等 |
| 毫米波雷达 | 10GHz-200GHz | 电磁波 | ACC/AEB/BSD等 |
| 超声波雷达 | 20KHz以上 | 机械波 | SVA/APA/APO等 |
激光雷达
主要是采用发射激光束的方式去测量周围环境物体的距离和方位的方法。组成包括发射模块、处理模块和接收模块;工作原理是通过发射探测信号(激光束)至目标对象上,接着把收到的从目标反射回来的信号(目标回波)与发射信号,适当处理后获取目标的距离、方位、高度、速度、姿态及形状参数等有关信息,从而对障碍物、移动物体等目标进行探测、追踪和识别。

车用激光雷达是以激光为载体进行测距和探测的传感器。激光雷达顾名思义就是通过发射的激光进行信息获取。具有有分辨率高(距离,角度,测量精度高)、作用距离远、体积小、质量轻、低空探测性能好、隐蔽性好、抗有源干扰能力强等优点。但是遇到雨雪雾霾等天气就“失灵”了,无法正常工作。另外其成本偏高。
根据扫描方式不同;激光雷达又分为三种(有的说法是四种):即机械式激光雷达、混合半固态激光雷达、固态激光雷达(OPA固态激光雷达及Flash 激光雷达)

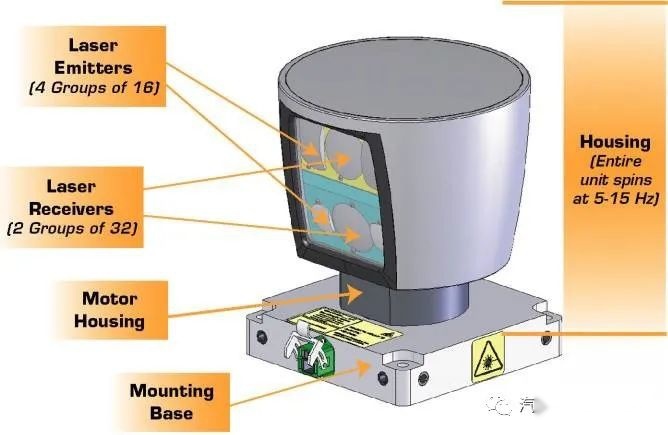
机械式激光雷达就是通过不断转发射头并把激光以快准稳的形式进行由线到面的转换;在垂直方向上排布多束激光,形成多个面,达到动态扫描并动态接收信息的。
其优势就是可以对周围环境进行360°的水平视场扫描;且在视场范围内测距能力的均匀性较强;劣势是价格昂贵,暂时给主机厂量产的可能性较小;光路调试、生产周期漫长,装配复杂,机械旋转部件在行车环境下的可靠性不高,难以符合车规的严苛要求等,主要厂家包括速腾聚创、镭神智能、北科天绘、禾赛科技、Ouster、Valeo、Waymo、Velodyne、等。
混合半固态激光雷达:指用半导体“微动”器件(如MEMS扫描镜)来代替宏观机械式扫描器,在微观尺度上实现雷达发射端的激光扫描方式。其中,MEMS 扫描镜是一种硅基半导体元器件,属于固态电子元件;但是 MEMS 扫描镜内部集成了“可动”的微型镜面,兼具“固态”和“运动”两种属性。所以大家都称其为混合半固态激光雷达。
优势是混合固态激光雷达工作时,单从外观上是看不到旋转的,是将机械旋转部件做得更加小巧并隐藏在外壳里面的。可以直接在硅基芯片上集成体积十分精巧的微振镜,由可以旋转的微振镜来反射激光器的光线,从而实现扫描;缺点是水平视场角较小;成本并不低,工艺一致性也不能完全保证,可量产性较低。主要厂家有华为、禾赛科技、速腾聚创、一径科技、镭神智能、万集科技、Innovusion、Blickfeld、Innoviz等。
固态激光雷达(OPA固态激光雷达及Flash 激光雷达)
OPA(光学相控阵技术):OPA固态激光雷达,运用相干原理,采用多个光源组成阵列,通过控制各光源发光时间差,合成具有特定方向的主光束。然后再加以控制,通过调节发射阵列中每个发射单元的相位差改变激光的出射角度,使主光束实现对不同方向的扫描;优势是数据采集速度快,分辨率高,对于温度和振动的适应性强;通过波束控制,探测点(点云)可以任意分布;可控性好、体积小等;劣势是容易形成旁瓣,影响光束作用距离和角分辨率,同时生产难度高;主要厂家有力策科技、万集科技、洛微科技、摩尔芯光、AnalogPhotonics等。

Flash(面阵式技术):Flash 激光雷达的原理是快闪,在短时间直接发射出一大片覆盖探测区域的激光,然后以高度灵敏的接收器,来完成对环境周围图像的绘制。属于非扫描式雷达,发射面阵光,是以二维或三维图像为重点输出内容的激光雷达;优势是数据采集速度快,分辨率高,对于温度和振动的适应性强;通过波束控制,探测点(点云)可以任意分布;能快速记录整个场景,避免了扫描过程中目标或激光雷达移动带来的各种麻烦;劣势是探测距离较近,在实际使用中不适合远程探测;基于 3D Flash技术的固态激光雷达,在技术的可靠性方面还存在问题;主要厂家有飞芯电子、北醒光子、大陆、IBEO、LeddarTech、Sense Photonics、Xenomatix、Ouster等。

毫米波雷达是工作在毫米波波段(millimeter wave )探测的雷达。通常毫米波是指30~300GHz频域(波长为1~10mm)的。毫米波的波长介于微波和厘米波之间,因此毫米波雷达兼有微波雷达和光电雷达的一些优点。

优点是:
(1)小天线口径、窄波束:高跟踪和引导精度;容易进行低仰角跟踪,抗地面多径和杂波干扰;对近空目标具有高横向分辨力;对区域成像和目标监视具备高角分辨力;窄波束的高抗干扰性能;高天线增益;容易检测小目标,包括电力线、电杆和弹丸等。

(2)大带宽:具有高信息速率,容易采用窄脉冲或宽带调频信号获得目标的细节结构特征;有很宽的扩谱能力,减少多径、杂波并增强抗干扰能力;相邻频率的雷达或毫米波识别器工作,易克服相互干扰;高距离分辨力,易得到精确的目标跟踪和识别能力。
(3)高多普勒频率:慢目标和振动目标的良好检测和识别能力;易于利用目标多普勒频率特性进行目标特征识别;对干性大气污染的穿透特性,提供在尘埃、烟尘和降雪条件下的良好检测能力。
(4)良好的抗隐身性能:当前隐身飞行器上所涂覆的吸波材料都是针对厘米波的。根据国外的研究,毫米波雷达照射的隐身目标,能形成多部位较强的电磁散射,使其隐身性能大大降低,所以,毫米波雷达还具有反隐身的潜力。
毫米波导引头的抗干扰、反隐身能力也优于其他微波导引头 。毫米波雷达能分辨识别很小的目标,而且能同时识别多个目标;具有成像能力,体积小、机动性和隐蔽性好

另外对于自动驾驶方面,毫米波雷达具有以下特点,
(1)作用距离较远(相对于超声波雷达),视场范围较大,探测距离远,角度分辨率较高,在应对天气方面,近似全天候,部分高强降水会影响性能。能够识别非标障碍物;同时成本中等水平。但是容易被金属物体反射,另外其对目标识别有难度,需要与摄像头协同使用。也完全符合车规器件的要求。
超声波雷达
听起来可能也有点陌生,但是却经常应用于我们生活之中,我们平常倒车经常借助的就是超声波的作用,才能确保我们的爱车不受视线以外的物体撞击(在没有倒车影像的车辆中来说);正因为超声波能被任何材质的障碍物反射,毫米波只能被金属物体反射,超声波雷达的探测距离又很近,测距原理跟毫米波和激光雷达差不多,
工作原理是通过超声波发射装置向外发出超声波,到通过接收器接收到发送过来超声波时的时间差来测算距离。常用探头的工作频率有 40kHz, 48kHz 和 58kHz 三种。一般来说,频率越高,灵敏度越高,但水平与垂直方向的探测角度就越小,所以大部分采用 40kHz 的探头。超声波雷达可以防水、防尘,即使有少量的泥沙遮挡也不会受影响。探测范围在 0.1-3 米之间,而且精度较高,因此非常适合应用于泊车。

类型的话分为两种,一种装在车辆前后保险杠上面的,用于测量障碍物距离以便倒车使用。就是前面几期《浅谈自动驾驶技术之ADAS(下)》里面说的UPA,另一种是装在侧面的,也是测量障碍物距离的,叫APA,两者探测范围和探测区域相差无几。UPA的探测距离15-300厘米左右,APA的探测距离在30-500厘米,因为其功率远高于UPA,所以成本也相应更高一筹。
超声波雷达相对毫米波和激光雷达而言,成本比较低,测距简单,能够识别非标障碍物,穿透力很强,非常符合车规器件的要求。在介质中传播距离远,短距测量很有优势。另外能量消耗少。但是在高速行驶状态下测距存在局限性,由于其传输速度受天气影响,所以天气不同,传播速度不同,高速时往往跟不上节奏,测距就会有误差。而且没有角度分辨率,所以方向性比较差。只能识别障碍物的位置,这一点和激光雷达一致,但是毫米波雷达可以识别障碍物的位置还能识别其轮廓。

目前比较知名的 雷达生产商有以下几家
同致电子;同致电子主要生产有汽车倒车雷达、遥控中控、后视摄像头、智能车内后视镜等产品,是国内各大汽车厂(如上海通用、上海大众、东风日产、上海汽车、神龙汽车、奇瑞汽车、吉利汽车、福特汽车等)的供应商,也是目前亚洲倒车雷达OEM市场第一供应商。
博世公司;博世公司有超声波雷达、倒车雷达、半自动泊车、全自动泊车,超声波雷达增加整个探测范围,提高刷新时间,每一个超声波雷达有一个代码,避免超声波雷达有噪音,可以更加精准。第六代超声波雷达可以很好地识别第五代产品无法识别的低矮物体。博世车用超声波传感器的检测范围为20~450厘米。
法雷奥;法雷奥的超声波雷达已经有十年的量产经验,短距超声波雷达覆盖范围为(2-4m)。其最新一代的自动泊车系统Park4U,就是基于超声波雷达,有平行与转角的两种泊车模式。车身前后只需留出40厘米的空间,该系统就能够自动完成泊车过程。其客户有路虎、起亚、大众途安等众多OEM厂商。
创作编撰不易,请动动您发财的手指,点击右下角“在看”及左下角的“分享”,让更多的朋友能够看到这篇文章,您的支持是对我最大的支持,持续关注我,带你了解更多自动驾驶方面的资讯。下一期我们将说说自动驾驶里面的算法。期待您的持续关注与支持。

OMEN暗影精灵 11 游戏笔记本(后简称暗影精灵11)可以说是近期关注度比较高的游戏本,硬件规格主流,性能释放不低,关键是价格太香了,国补后RTX 5060版本最低也就6000多一点,RTX 5070版本国补后最低甚至低于7000元,性价比放在一线品牌中十分突出。今天我拿到了暗......
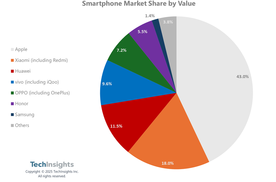
今年中国618购物节提前至5月13日鸣锣开市,各大电商平台试图通过拉长战线刺激消费。TechInsights发布的数据显示, 尽管此举带动平台总成交额(GMV)实现增长,但智能手机市场却呈现出复杂图景:销量整体持平,销售额却因零售价格普降而遭遇下滑。

下一代800 V电动汽车牵引逆变器参考设计:提高电动汽车的性能耐久性和续航里程

容声冰箱携“寻鲜之旅”养鲜答卷鲜耀南博会!
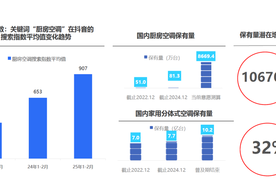
炎炎夏日,当城市在热浪中喘息,无数家庭的厨房正化身“高温孤岛”。这种困境催生了一个新兴市场:厨房空调。然而,一面是高速增长,一面是家庭渗透率仍不足1%的现实,这款被寄予厚望的产品,究竟是真正的生活刚需,还是企业炒作的精致鸡肋?

这几年中国品牌新能源车的表现可以说是又便宜又好用,消费者们也习惯了国产高品质新能源车带来的优秀用车体验,甚至经常在系统UI好不好看这种细节问题上给产品挑刺。

发动机质量日系遥遥领先,但要说技术还得是德系!
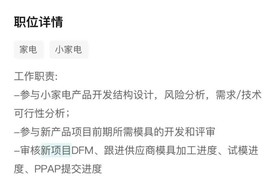
日前,多个招聘平台的招聘信息显示,潮玩巨头泡泡玛特正在招募小家电研发工程师、工业设计师等专业人才,月薪在1.5万-2.5万元,岗位职责明确指向复古小冰箱、咖啡机、早餐机的开发流程,甚至要求十年以上家电行业经验。这家以盲盒玩偶风靡全球的企业,正在向一个看似毫不相干的领域伸出触角——......

想让迷你主机更流畅?金百达DDR5 5600笔记本内存提升的不是一点点

全球高端电视市场的竞争格局,正迎来中韩巨头深度较量的关键时期。一边是以三星、LG为代表的韩国巨头,凭借深厚的显示技术底蕴和品牌积淀强势布局;另一边则是以TCL、海信为首的中国军团,以极具性价比的创新技术与灵活策略发起冲击。这场交锋的核心焦点,已鲜明地聚焦于新型显示技术路线的争夺:......

当城市的霓虹渐次亮起,结束一天忙碌的人们总会期待一场舒适的沐浴 —— 它不仅是身体的清洁仪式,更承载着卸下疲惫、焕活身心的期待。然而,传统热水器长期困于 “恒温”“节能” 的功能内卷,让沐浴体验停留在 “有热水用” 的基础层面。

好开 够稳 更聪明 | iCAR V23以全能实力燃爆昆仑决世界格斗冠军赛104

东风日产这把AI椅子绝了!坐上去秒扫描全身,0.3秒腰托顶上来,按摩像八个师傅伺候!百万豪车技术塞进办公椅,还能自己OTA升级学习?躺赚了属于是!

在生物柴油上涨的推动下,相关上市公司业绩表现随之修复。

罗姆宣布,与领先的车规芯片企业芯驰科技面向智能座舱联合开发出参考设计“REF68003”。
“一家在海外市场已经很有知名度的中国电视品牌,利用其现有渠道转做空调,但其净利润率仅为3%。”2025年6月底,深圳“中国企业出海高峰论坛”上,格力电器市场总监朱磊的发言引发关注。
智能驾驶当下的发展方向,一个是从L2级别辅助驾驶向L3级别自动驾驶迈进,另一个就是实现算力硬件的自研,比如说小鹏即将在G7上首发上车的自研图灵AI芯片。哪怕是财务状况一直紧张的蔚来,也在不遗余力推动自研神玑NX9031芯片的发展。

强到没朋友,指纹加密+100W快充,这款至高8T硬盘盒颠覆我的体验
全新荣耀一步不退!“V587”AI全家桶以自研技术重构终端生态
中国车企自动驾驶正经历量产普及、技术跨越、生态输出的三阶跃迁,2025年也将是针对L3级自动驾驶量产的爆发元年,中国车企需把握数据主权与技术普惠双轮驱动,构建全球智能汽车新秩序。我们在家“坐等”新车上门的时代,也许就在不远的未来。


































 京公网安备 11010102004670号
京公网安备 11010102004670号