
在理想OTA 6.0中,新AD MAX版本正式推送后的10天时间内,第一批使用上新AD MAX智能驾驶功能的用户反馈。大多都是,好开好用,大部分工况下可以依靠城市NOA功能来通勤,但极少数的复杂工况还是需要人类驾驶员接管。
更新后的朋友应该会注意一个细节,城区无图NOA全量推送之后,大多数道路基本上都可以显示NOA了。其他部分就还是LCC功能可用。
部分车主也晒图了,晒了最近几天的智能驾驶使用比例。普遍的智能驾驶占总出行天数超过50%的很多;智能驾驶占总里程40%的,也很多。可见,这套AD MAX 系统在用户群体中的接受度,不算低。

至少80%左右的反馈,是好用的;20%的反馈,是在复杂工况下导致的降级或者被接管,例如环岛这种复杂工况。个人感觉,如果了解理想这套AD MAX智能驾驶底层逻辑的话,是可以理解在版本初期有这种情况发生的。到了版本后期或者大版本迭代后,如果还是有这种情,挨喷也是合理的。

这一次,理想汽车给AD MAX用户们推送的,是理想汽车最新的无图NOA功能,无论是城市、城镇还是二级道路上,都能用。和之前的AD MAX版本的不一样,是在BEV和感知能力、规控能力上都得到了明显的提升,而且对环境的复杂程度基本感知不到有什么限制了。
新的AD MAX 版本也推送有一段时间了,实际效果到底好不好用?
直接来看实际案例,两个在我们日常用车时候,会高频出现的场景,绕行功能和转弯(左、右转弯)功能。要承认,这套系统的绕行功能,在一部分高难度工况下已经有了非常拟人的驾驶经验和习惯。
在市区道路中,双车道左侧有车辆占据车道、右侧有车辆压线停在非机动车道与车道之间;而刚好两车之间的横向空间,留出了一台理想L7可以通过的距离。按照之前的城区NOA功能的话,肯定是等待有更宽裕的空间后才会选择通行。

但,这次更新后的城区NOA策略不一样了,对于距离上的控制更激进了。所以,在距离留的不算充裕的前提下(但足够车辆通行),理想L7用城区NOA功能自己开过去了。但整个过程,大概犹豫了12秒左右的时间;这个时间,应该是BEV网络在做传感器信息验证(提一句,下次大版本迭代这个犹豫的时间会被缩短)。
还是绕行能力的第二个场景下,也体现的很拟人。双向单车道的道路环境下,压着黄色虚线绕行的动作,这是我们熟悉的驾驶策略;像华为的ADS 2.0之前就因为这个功能的实现,让人觉得智驾细节更好更拟人,现在理想新的AD MAX版本也学会了。而且在实际的驾驶测试的时候,可以连续借道绕行。

另一个高频场景,就是左右转弯的工况,而这个工况下涵盖的特殊情况很多。包括,无车道线标识的长断线工况、错位路口、有行人穿越的路口、有逆向行驶的非机动车工况等。至少在实际测试的情况下,理想新的AD MAX这套智能驾驶系统在其中部分工况下的完成度,值得肯定。
无车道线标识的长断线路口,这里其实考验的是对场景的理解能力如何,可以根据转弯路口的标识线,经过一段长距离的无标识线的路面后顺利找到转弯后应该行驶的道路内。这是无图城区NOA转弯工况的一个难题,目前来看,AD MAX在这个场景下,表现合格。断线路口也涵盖直行工况,但难度不高,不用掰开了讲。
至少在短短10km左右开启智能驾驶的路段中,多次转弯均能实现准确的规划行车路线。那么,在左右转弯这个基本条件做好了的前提下,在这个工况中,上难度的场景,就是在转弯的同时融入绕行功能,也就是避开逆向非机动车等。

在有行人穿越的路口,这块没做激进策略,选择等待到最后一个行人通过后,继续行驶;有行人突然窜出的场景,刹停或者是减速让行(这个时候就看行人、非机动车距离车辆的距离远近了)。
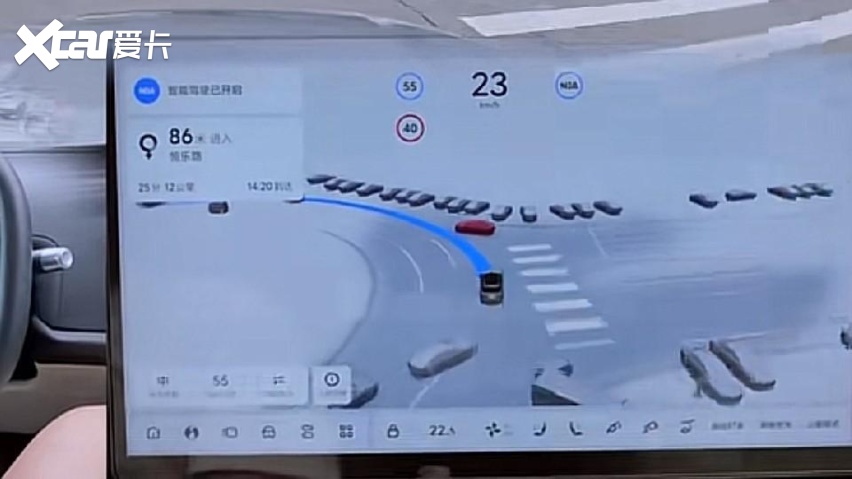
其实在万人测试的版本上,有环岛工况会自动降级LCC的情况发生。
但全量推送之后,找了三个环岛+右转的场景测试,均可以实现顺利通行。我们通过中央品目可以发现,它规划的路径始终是保持在最外侧,而不是会向内侧更好通行的路线去并线(也不知道这是否足够拟人),但最终都是顺利完成环岛绕行并且完成右转弯的操作。至少在这次测试的三个环岛中,没有出现自动降级LCC的情况发生。
在华为后,理想的智驾系统现在是国内唯二的无图城区NOA功能,好用的该夸,但不好用的地方,也同样要提。
在连续转弯的工况下,会自动退出城区NOA功能。也就是在一个左转弯马上就接右转弯的场景,这里的连续转弯容错率很低;如果按照正常人类的驾驶经验,这种工况多少都会直接驶入右转弯车道,而智驾系统这里多做了一个左转弯的动作,直接进入实现区域,不能进行右转弯车道,随后被接管。
还有,在极窄道路下,左侧是黄实线、右侧有摩托车占道的工况。
上面提到过这种窄道工况,理想L7在博弈之后,是可以顺利通行的。但,在右侧为摩托车的时候,它可能在测距上就没有那么精准了,毕竟摩托车相对于汽车的测距而言,它算是一个不太规则的物体,可能会有误差。

当然,博弈之后,理想智驾还是选择继续贴着右侧摩托车通行,但目测距离贴的过近,于是驾驶员选择了接管。如果不接管,大概会有两种可能性,一是顺利通过、二是和摩托车发生剐蹭。
这次的测试没有走到乡村道路以及遇到掉头这些场景,但,也发现了这套系统的一些优点和问题。
目前更新后的新的AD MAX好处:
大部分正常工况下并不再会压着车道线行驶,除了借道绕行等会有,其他情况不会出现;
对于距离控制的过于自信,策略博弈后选择通行的概率很大(除非前面有障碍物,会选择等),但这点有利有弊;
解决了环岛降级LCC的问题,沿着外侧车道行驶到转弯路口;
断线路口的转弯,逻辑清晰轨迹丝滑,证明场景理解能力不错。

不太理想的地方:
距离控制的自信,带来的弊端,是在极限工况下,可能会发生剐蹭,无论主动还是被动都很难避免;
连续转弯的处理上,不够拟人,还是按照刻板驾驶逻辑在跑,这点需要再优化;
环岛绕行路线,速度平均20km/h左右,并不算快;
城区内部分区域还不能开通NOA功能,只能使用LCC功能。
对于OTA 6.0版本刚全量推送不足月的AD MAX,我们可以给一些宽容度,客观来看在功能的完成度上,80%城市道路内是可以不用被接管的,对于第一个无图城区NOA版本来说,是合格的。而且这套智能驾驶的底层逻辑,是需要海量的收集数据、学习、训练后,才会越来越好用。
通过这次的OTA 6.0推送,我们可以明确几个点。理想AD MAX的智驾的城区NOA能用、好用;系统对场景的理解能力底子不错,复杂路口不降级。虽然缺点有,但底层学习逻辑,希望可以在后续的版本升级迭代中逐渐做好。

比亚迪海鸥又有新对手了?9月初,吉利汽车发布了一款全新纯电A0级轿车——星愿。轴距2米6,标配独立悬架,后驱,搭载宁德时代磷酸铁锂电池,而且还给了Flyme Auto智能座舱,计划

买车讲究“金九银十”,因此该月份是买车的好时机。而领克在近日推出后领克07 EM-P的购车权益,全系车型限时优惠价格仅为15.98-17.98万元,除了降低购车门槛外,购车用户还可

在追求品质生活的今天,一辆既能满足日常需求又能彰显个性的B级轿车成为了许多家庭的首选。全新迈腾B9凭借其卓越的豪华感和超前的科技配置,在B级车市场中脱颖而出,相较于传统强手帕萨特,

在当前激烈的SUV市场竞争中,年轻消费者对汽车的需求早已不再局限于交通工具的基本功能,他们更追求通过爱车来表达自己的个性与品味。作为上汽大众的最新力作,途岳新锐凭借其20万元级别的

作为阿维塔的第三款车型,阿维塔07的纯电车型和增程车型会同时发布。背靠长安汽车这样的大厂,阿维塔可是不缺发动机的。甚至,部分发动机技术已经超过了主流燃油车。当然,阿维塔07也保留了阿维塔品牌特立独行的设计风格。

尽管在过去几年里,全球的乘用汽车产销量没有明显的增长,但中国新能源汽车却凭借持续的探索和深耕,呈现出逆势爆发的增长态势。这其中,比亚迪的表现最为亮眼。相关销量榜单显示,今年7月比亚

当全新一代迈腾B9以更加时尚的外观、更智能的配置以及更出色的动力性能出现在我们面前时,不难发现,它已经悄然超越了同门师兄帕萨特。从设计到性能,从配置到舒适,迈腾B9无疑为消费者提供

近日,丰田STARLET CROSS实车曝光,售价约合人民币12万起,新车主要针对的是南非市场。造型方面,新车前脸多边形进气格栅采用熏黑网格设计,上侧有着镀铬饰条连接修长灯组。前包

近日,全新一代大众Jetta GLI售价曝光,价格约合人民币24.12万。这款车型对应的是国内的速腾。而速腾会不会也推出GLI版本,目前还没有确切消息。外观造型方面,大众Jetta

今日,极氪智能科技公布最新交付量:2024年8月交付18015台,同比增长46%,环比增长15%,同环比双增长。今年1-8月共交付121540台,同比增长81%。截至8月底,极氪累

为了提高知名度,灵悉L最近频频进行跨界合作

比亚迪第五代DM技术自5月份发布后,引起了汽车市场广泛的热议和关注。9月4日,比亚迪在武汉举行了第五代DM技术解析会,来自汽车新技术研究院的高级工程师,全面解析了第五代DM的技术创

上汽大通大家9,“混”势魔王随着超混车型的推出,大家9和大家7,终于是进入了MPV市场真正的红海。而作为国产豪华MPV的顶流腾势D9,是所有MPV都绕不过去需要对标的车型。毕竟新能

9月5日,新豪华智享C级轿车领克Z10在杭州正式上市,上市限时价19.68万元起,提供5款版型,以满足不同用户的多元需求。作为领克首款纯电C级轿车,领克Z10拥有一眼可辨的领克范、

在B级车市场的激烈竞争中,全新迈腾B9以一场华丽的蜕变震撼登场。它不仅保留了迈腾家族的经典与品质,更在外观设计上大胆突破,颜值直逼甚至超越帕萨特。而最令人瞩目的是其加大的车身尺寸,

2024年成都车展首日,华晨宝马X1 M35Li上市。开幕日最具体话题的燃油车或许就是这台车,因为它的售价定为40.99万元!乍一看四十万级的宝马汽车似乎并不会觉得有多贵,可是一听

比亚迪第五代DM技术自5月份发布后,引起了汽车市场广泛的热议和关注。9月4日,比亚迪在武汉举行了第五代DM技术解析会,来自汽车新技术研究院的高级工程师,全面解析了第五代DM的技术创

(关键词:35.6英寸大屏、U型方向盘、高通8295芯片、双叉臂悬挂)极越07定位中大型纯电轿车,轴距超过3米,是品牌旗下的第二款车型,作为吉利和百度联合打造的产品,极越07基于S

汽车说刊讯|今年车市出现最高频的词就是“卷”,卷价格、卷流量、卷老板、卷直播,但能坚持“卷”到底,坚持“卷”出国,“卷”出世界一流汽车品牌的,却是少数。长安汽车不怕“卷”,不仅因为

近日,一则有关MINI COOPER SE的召回引起汽车爱好者们的热议。该品牌将全球召回超过14万辆上述车型,究其原因是高压电池或高压系统可能会出现故障,导致故障的原因有多种;在故








































 京公网安备 11010102004670号
京公网安备 11010102004670号