上周我们发布了一篇写给小白的激光雷达科普文章,在评论区里我们收获了大量好评,也有很多朋友希望我们有更多相关的分析。
那不如让我们从最近热度最高的蔚来开始说起。
1 月 9 日 NIO Day 上,李斌不紧不慢地说出「今天,我们让智能电动汽车再近一步,从辅助驾驶到自动驾驶」之后,我明白蔚来这次要放大招了。
量产车感知硬件的新高度
先从名字说起,目前蔚来的辅助驾驶名为 NIO Pilot,而发布会上的这套自动驾驶系统叫 NAD,即 NIO Autonomous Driving。在宣传层面明示「自动驾驶」已经可以看出蔚来对这套系统有着很高预期,而蔚来这番自信的底气很大一部分源于 NAD 史无前例的硬件配置。
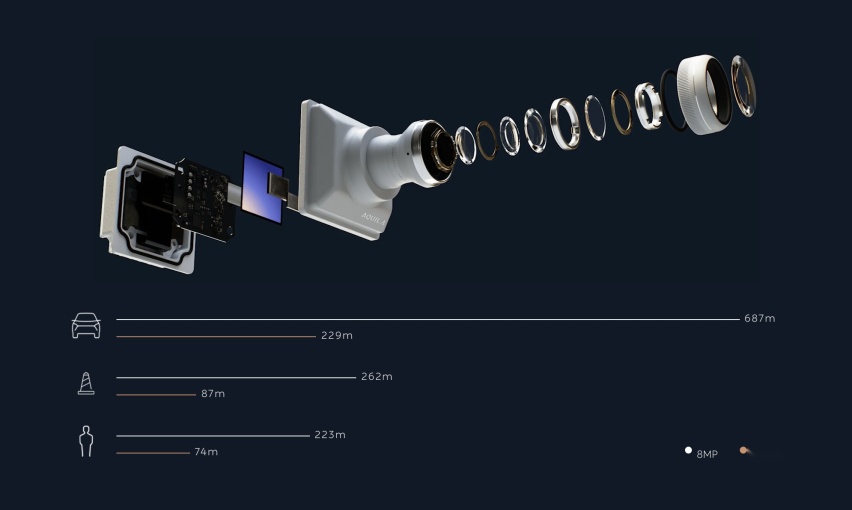
ET7 上搭载了大量智能驾驶传感器,常规项目包含 11 个 800 万像素高清 ADAS 摄像头、5 个毫米波雷达、12 个超声波雷达、2 个定位单元(GPS + IMU) 、1 个增强主驾感知、1 个 V2X 车路协同感知单元。
其中 800 万像素的 ADAS 摄像头为全球首发,蔚来表示这一摄像头比特斯拉目前采用的 120 万像素摄像头拥有更高的分辨率,具备更远的视觉感知距离,若参考发布会 PPT 上的数据,其感知距离提升近 3 倍。
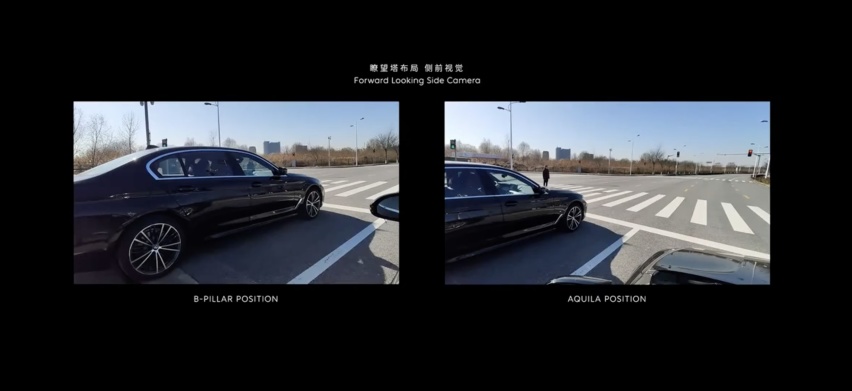
而且这次蔚来将摄像头布置在了车顶,相比 B 柱的摄像头拥有更高更广的视野,盲区也相应减少,在车多视野差的场景能有效提高系统安全性。
然而在上述 6 类共 32 个传感器的加持下,蔚来依然觉得不够,伴随李斌缓缓说出「自动驾驶需要激光雷达」,大屏幕给到 ET7 的车顶特写:蔚来 ET7 用上激光雷达了。
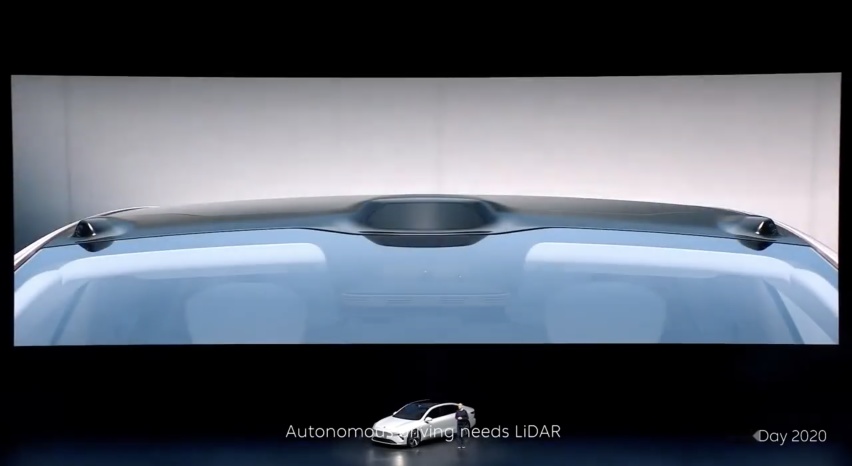
为什么李斌说「自动驾驶需要激光雷达」
目前智能驾驶主要的道路环境传感器包括摄像头与各类雷达,而厂家之所以会用不同种类的传感器,关键的原因还是因为它们都并非全能。
摄像头:信息最多,测距最难
视觉是信息量很大的感知方式,形状、颜色、物体类型、运动状态等信息都可以通过视觉得知,人类驾驶也是基于视觉信息。
但机器和人不一样,摄像头虽然可以捕获图像的信息,但是要从图像中去理解上述更高阶的形状、距离、物体类型、运动状态等信息其实是一个很复杂的事情,这个过程是需要大量图像算法协助处理的。或者简单来说,机器是没办法通过摄像头的图像直接得到驾驶环境信息的。
而通过图像加算法间接获得的信息中,最难的莫过于距离信息,也就是景深。因为摄像头捕获的本就是间接的 2D 信息,通过 2D 图像再经过各种转换后的距离测算不可避免会存在误差,所以为了更直接和精确地测距,车辆上都会安装雷达传感器。
雷达军团:各有所长亦各有所短
目前智能驾驶所用的雷达包括毫米波、超声波以及激光雷达,其中超声波雷达属于机械波传感器,波速度为声速,延迟相对较大,再加上角度散射大,所以难以进行远距离的探测,常用于低速状态数米以内的近距离探测。
毫米波雷达属于电磁波传感器,波速为光速,相对于超声波雷达,毫米波雷达在探测距离和精度都有了显著的提升,可以完成更高速度以及 100 m 级别的远距离探测,成本上多数毫米波雷达也在几百元的级别,所以这种传感器也是目前辅助驾驶的常用距离传感器。
不过毫米波雷达也存在明显的不足,目前多数毫米波雷达探测的信息包括:
物体的水平 XY 坐标
物体相对雷达方向的速度
即多数毫米雷达是不能很好探测物体的 Z 向信息和侧向移动速度的,因此如果前方有一台底盘很高的半挂车正在横穿马路,毫米波雷达可能并不能提供足够全面的信息和预警。
但激光雷达是可以的。
激光雷达如字面意思,是发射并接收反射激光用于测距的传感器,波速是光速,相比前两种传感器,激光雷达可以提供全面的道路环境 3 维信息,其中不仅包含探测物体的 3 维坐标信息,还包括反射面的法向量信息和被探测物体的 Vx、Vy 方向的速度信息。换成实际情况来讲,激光雷达不仅可以识别物体的 3 维空间位置,还可获悉物体的朝向,物体的速度以及速度方向。而且,这些信息都是通过激光雷达获得的实际点云数据直接计算得出的,即插即用并且实时性和精度两方面都有保证。
因此激光雷达是一种适用于 3 维高精度测量的传感器,而这无疑是对探测 3 维信息存在困难的视觉感知的一项强有力的补充。这也是李斌为什么说「自动驾驶需要激光雷达」。
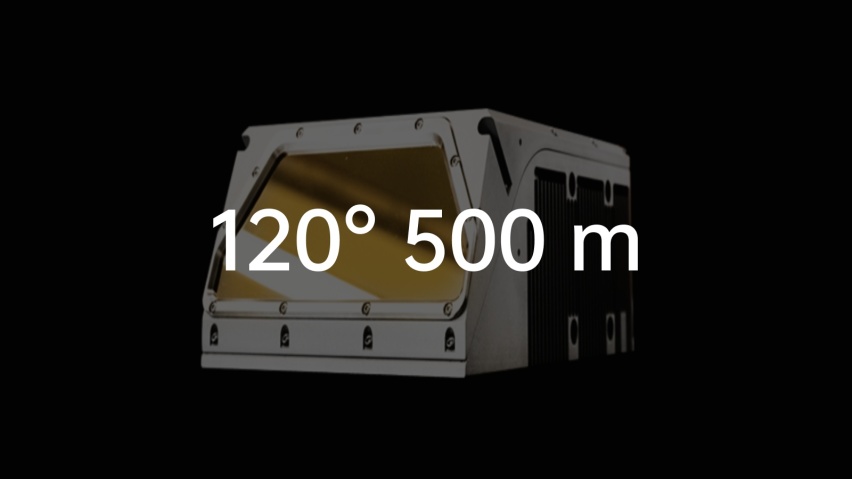
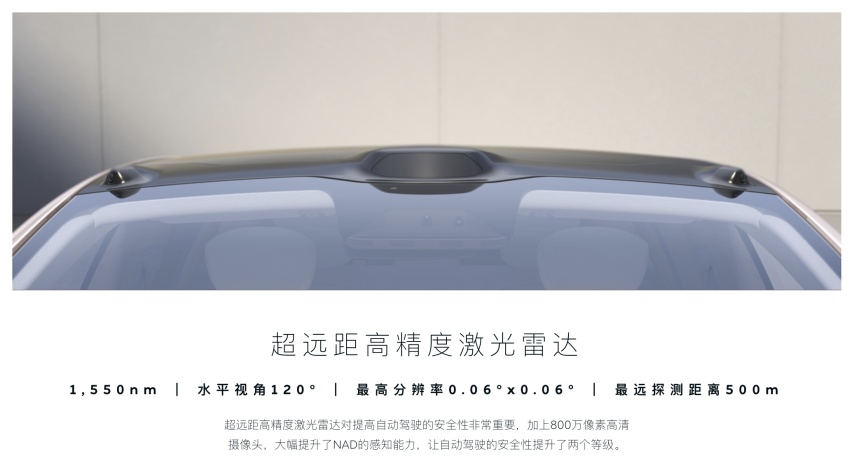
蔚来 ET7 上所使用的这颗 Innovusion 等效 300 线激光雷达在 NIO DAY 上公布的信息包括:FOV 水平探测角 120°、最大角分辨率 0.06°(水平)× 0.06°(垂直)、最远探测距离 500 m。这几项相对而言都属于比较不错的水准,另外这台激光雷达采用了对人眼更友好的 1,550 nm 的波长,即便大功率运作也不会对路人产生健康上的影响。
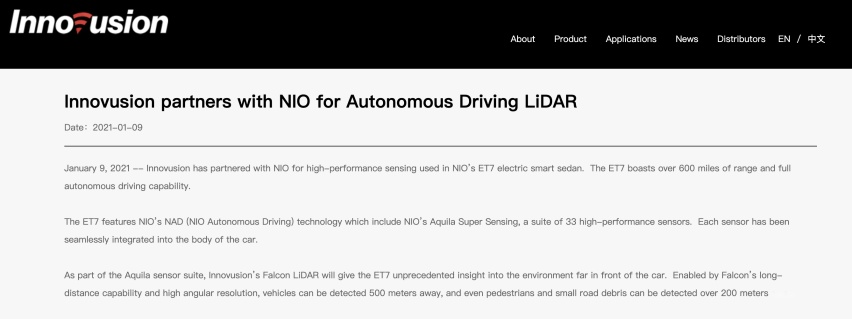
而随后我也去 Innovusion 官网看了一眼,现有的两款产品 Jagura 65/100 和发布会数据均对不上号,产品中为「coming soon」状态,看上去集成度更高的 Falcon 激光雷达引起了我的注意,而官方的新闻稿件中也明确提到 ET7 上会搭载这款雷达,并表示工作行程中对于前方小目标物体比如行人以及路面障碍物的探测距离到达了 200 m。

不过客观来说,虽然激光雷达性能强大,它也并非全能。
而其中一个显而易见的问题就在于激光雷达虽然可以提供全面且精确的 3 维空间信息,但激光雷达扫描得到的点云信息只有模型轮廓,既没有颜色也看不出图案,更别提物体表面的的光泽信息。所以不论是通过直接还是间接的方式,激光雷达都难以知晓「被扫描物体是什么」。
在缺乏这类信息的情况下要让系统做出一个妥善的驾驶决策显然是不现实的。视觉为主负责环境中的道路与各类物体识别,雷达为辅负责空间位置与物体的速度感知,两者融合匹配。不同的是别家用的多数为毫米波雷达,蔚来用的是精度和信息量都上了不止一个等级的激光雷达。
在这之后,蔚来 NAD 还有另一个大招。
图像处理,4 块 N 卡够不够
蔚来 NAD 感知层面丰富的传感器给车辆的自动驾驶带来了多样且全面的感知信息,其产生的图像数据量也达到了 8 G/s,这也意味着数据的处理需要一套强大的硬件作为支撑。

蔚来对此给出的方案是 4 块 N 卡 —— 由 4 颗英伟达 Orin 芯片组成,总算力达 1,016 TOPS 的 ADAM 计算平台。对比之下英伟达如今的 Xavier 芯片算力为 30 TOPS,目前市面上算力最高的特斯拉车型搭载的两块 HW 3.0 芯片累计算力为 144 TOPS。
ADAM 的四芯三用
算力的分配上,特斯拉一块 HW 3.0 芯片包含 2 颗 36 TOPS 的神经元处理器,这 2 颗神经元处理器会各自收到来自传感器输入的「一式两份」感知数据中的一份,经运算处理后得到相关的驾驶决策,系统会将两颗处理器运算后的结果进行对比,在一致性达标的情况下输出可用于执行的驾驶决策。
而另外一块 HW 3.0 芯片特斯拉有多重考虑,一方面是防止出现芯片失效用作备份冗余,另一方面特斯拉还用这颗备用的芯片在「影子模式」中试跑不执行的测试版软件代码,当运算结果与实际驾驶情况偏差较大时系统会标记对应路段的素材回传云端。
蔚来 ADAM 平台中的 4 颗 Orin 芯片其中 2 颗为主控芯片,负责 NAD 的全栈运算,包括多模态预测与决策、多源组合定位以及多方案的相互校验。剩余的 2 颗 Orin 芯片 1 颗用于安全冗余备用,1 颗用于自动驾驶群体智能与个性化训练。
不难看出,蔚来 ADAM 平台的设计其实与特斯拉颇有几分类似,既有运算和对比校验的单元,也有备份冗余的单元,还有用于 AI 训练的单元,不同的是蔚来 ADAM 硬件部分的单元算力与总算力两项上都是特斯拉的 7 倍有余。
看到 4 颗 Orin 堆叠下夸张算力参数后,我相信有人会觉得这是蔚来一贯的「饱和式堆料」。但自动驾驶发展对于系统算力的需求可预见的是呈指数级增长的,这样的行业前进速度下「性能过剩」就是个伪命题。而且高性能带来了更长的产品生命周期,对于一贯强调用户思维的蔚来而言,这是一举多得的事情。再者蔚来这样的做法也是给行业按下了加速键,一方面推动自动驾驶的迭代技术量产,另一方面也是让消费者成为受益方。
另外这 1,016 TOPS 的算力如果对比特斯拉的做法,其实一点也不为过。
特斯拉 HW 3.0 芯片上的两颗神经元处理器每一颗 36 TOPS 的算力处理的图像数据来自 8 颗 120 万像素摄像头,蔚来 ET7 是 11 颗 800 万像素的摄像头。
图像算法是基于像素的,所以在帧率相同的情况下,同样时间内后者产生的图像数据大小是前者的 9 倍有余,而 ADAM 平台主控的两颗 Orin 也是做双校验运算,每颗 254 TOPS 的算力比 HW 3.0 上的神经元处理器多 7 倍出头。
对比之下,蔚来的配置一下就合理了。
蔚来这波稳了吗?
那么在视觉 + 激光雷达 + 高算力平台之后,蔚来 NAD 自动驾驶稳了吗?
依我看,开了个好头。蔚来在感知和算力平台这两项关键的硬件部分打了很好的地基,在算力之外,自动驾驶的其他关键环节蔚来也做了充分冗余设计:核心控制器供电冗余、转向控制冗余、制动冗余以及双电机带来的动力系统冗余。正如李斌所说「每一点安全提升,都值得全力以赴」。
而剩下的环节里还有软件和算法。让有着极佳「身体天赋」的 ET7 想实现自动驾驶还得让它学会认识世界并且学会开车。但从 ADAM 上那颗专门用于自动驾驶群体智能与个性化训练的 Orin 芯片来看,蔚来已经有所准备了。
不过芯片从 Mobileye 换成英伟达后,位于美国硅谷中心区的蔚来圣何塞自动驾驶研发中心在新车交付前的这一年时间里是有得忙了。
对了,蔚来 NAD 还有一个非常「蔚来」的购买方式 —— 硬件标配,功能按月付费,每月 680 元。64,000 元的特斯拉 FSD 买了之后没有后悔药,但蔚来 NAD 如果用起来感觉不好用户下个月就可以退订,在标配硬件的前提下这种做法其实是很要勇气的,某种程度上也可以看出蔚来做好 NAD 的决心。
最后,我不敢说蔚来 NAD 会是届时最强的自动驾驶,但配备 1 枚 Lidar 加 4 块 N 卡之后 ET7 的自动驾驶能力已经有了很好的保底,上限在哪也让人充满想象,配合 680 每月的价格后,它很可能是最亲民以及订阅率最高的自动驾驶系统。
这两点上,蔚来这次都确实走在行业的前列,而且我相信这应该不会是惊喜的终点。

OMEN暗影精灵 11 游戏笔记本(后简称暗影精灵11)可以说是近期关注度比较高的游戏本,硬件规格主流,性能释放不低,关键是价格太香了,国补后RTX 5060版本最低也就6000多一点,RTX 5070版本国补后最低甚至低于7000元,性价比放在一线品牌中十分突出。今天我拿到了暗......
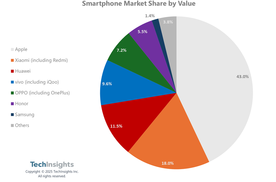
今年中国618购物节提前至5月13日鸣锣开市,各大电商平台试图通过拉长战线刺激消费。TechInsights发布的数据显示, 尽管此举带动平台总成交额(GMV)实现增长,但智能手机市场却呈现出复杂图景:销量整体持平,销售额却因零售价格普降而遭遇下滑。

下一代800 V电动汽车牵引逆变器参考设计:提高电动汽车的性能耐久性和续航里程

容声冰箱携“寻鲜之旅”养鲜答卷鲜耀南博会!
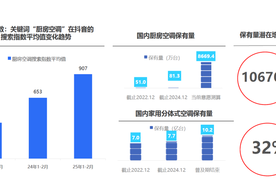
炎炎夏日,当城市在热浪中喘息,无数家庭的厨房正化身“高温孤岛”。这种困境催生了一个新兴市场:厨房空调。然而,一面是高速增长,一面是家庭渗透率仍不足1%的现实,这款被寄予厚望的产品,究竟是真正的生活刚需,还是企业炒作的精致鸡肋?

这几年中国品牌新能源车的表现可以说是又便宜又好用,消费者们也习惯了国产高品质新能源车带来的优秀用车体验,甚至经常在系统UI好不好看这种细节问题上给产品挑刺。

发动机质量日系遥遥领先,但要说技术还得是德系!
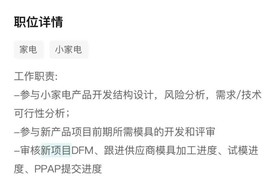
日前,多个招聘平台的招聘信息显示,潮玩巨头泡泡玛特正在招募小家电研发工程师、工业设计师等专业人才,月薪在1.5万-2.5万元,岗位职责明确指向复古小冰箱、咖啡机、早餐机的开发流程,甚至要求十年以上家电行业经验。这家以盲盒玩偶风靡全球的企业,正在向一个看似毫不相干的领域伸出触角——......

想让迷你主机更流畅?金百达DDR5 5600笔记本内存提升的不是一点点

全球高端电视市场的竞争格局,正迎来中韩巨头深度较量的关键时期。一边是以三星、LG为代表的韩国巨头,凭借深厚的显示技术底蕴和品牌积淀强势布局;另一边则是以TCL、海信为首的中国军团,以极具性价比的创新技术与灵活策略发起冲击。这场交锋的核心焦点,已鲜明地聚焦于新型显示技术路线的争夺:......

当城市的霓虹渐次亮起,结束一天忙碌的人们总会期待一场舒适的沐浴 —— 它不仅是身体的清洁仪式,更承载着卸下疲惫、焕活身心的期待。然而,传统热水器长期困于 “恒温”“节能” 的功能内卷,让沐浴体验停留在 “有热水用” 的基础层面。

好开 够稳 更聪明 | iCAR V23以全能实力燃爆昆仑决世界格斗冠军赛104

东风日产这把AI椅子绝了!坐上去秒扫描全身,0.3秒腰托顶上来,按摩像八个师傅伺候!百万豪车技术塞进办公椅,还能自己OTA升级学习?躺赚了属于是!

在生物柴油上涨的推动下,相关上市公司业绩表现随之修复。

罗姆宣布,与领先的车规芯片企业芯驰科技面向智能座舱联合开发出参考设计“REF68003”。
“一家在海外市场已经很有知名度的中国电视品牌,利用其现有渠道转做空调,但其净利润率仅为3%。”2025年6月底,深圳“中国企业出海高峰论坛”上,格力电器市场总监朱磊的发言引发关注。
智能驾驶当下的发展方向,一个是从L2级别辅助驾驶向L3级别自动驾驶迈进,另一个就是实现算力硬件的自研,比如说小鹏即将在G7上首发上车的自研图灵AI芯片。哪怕是财务状况一直紧张的蔚来,也在不遗余力推动自研神玑NX9031芯片的发展。

强到没朋友,指纹加密+100W快充,这款至高8T硬盘盒颠覆我的体验
全新荣耀一步不退!“V587”AI全家桶以自研技术重构终端生态
中国车企自动驾驶正经历量产普及、技术跨越、生态输出的三阶跃迁,2025年也将是针对L3级自动驾驶量产的爆发元年,中国车企需把握数据主权与技术普惠双轮驱动,构建全球智能汽车新秩序。我们在家“坐等”新车上门的时代,也许就在不远的未来。



































 京公网安备 11010102004670号
京公网安备 11010102004670号