9月5日,在长安天枢智能体验区里,一台阿维塔12原型车缓缓登台,车辆在四个车轮的协同工作下表演了一手原地掉头。至此,阿维塔以及背后的长安科技正式加入了分布式电驱的技术战场,为什么各家都在研发分布式电驱?今天,我们就来简单聊一聊。

到底啥是分布式电驱?为什么要做分布式电驱?
什么是分布式电驱?众所周知的解释是“每个车轮都由一个电机驱动”,然而这只不过是表象,如果只是让每个车轮都有一个电机来驱动,早在1900年保时捷老爷子就已经实现了,我们现在说的分布式电驱,除表象的多轮端电机之外,实质上它还是车辆控制单元与动力单元为了适应现在汽车能真正成为一个由软件定义的,能够持续迭代和进化的智能终端的产物。
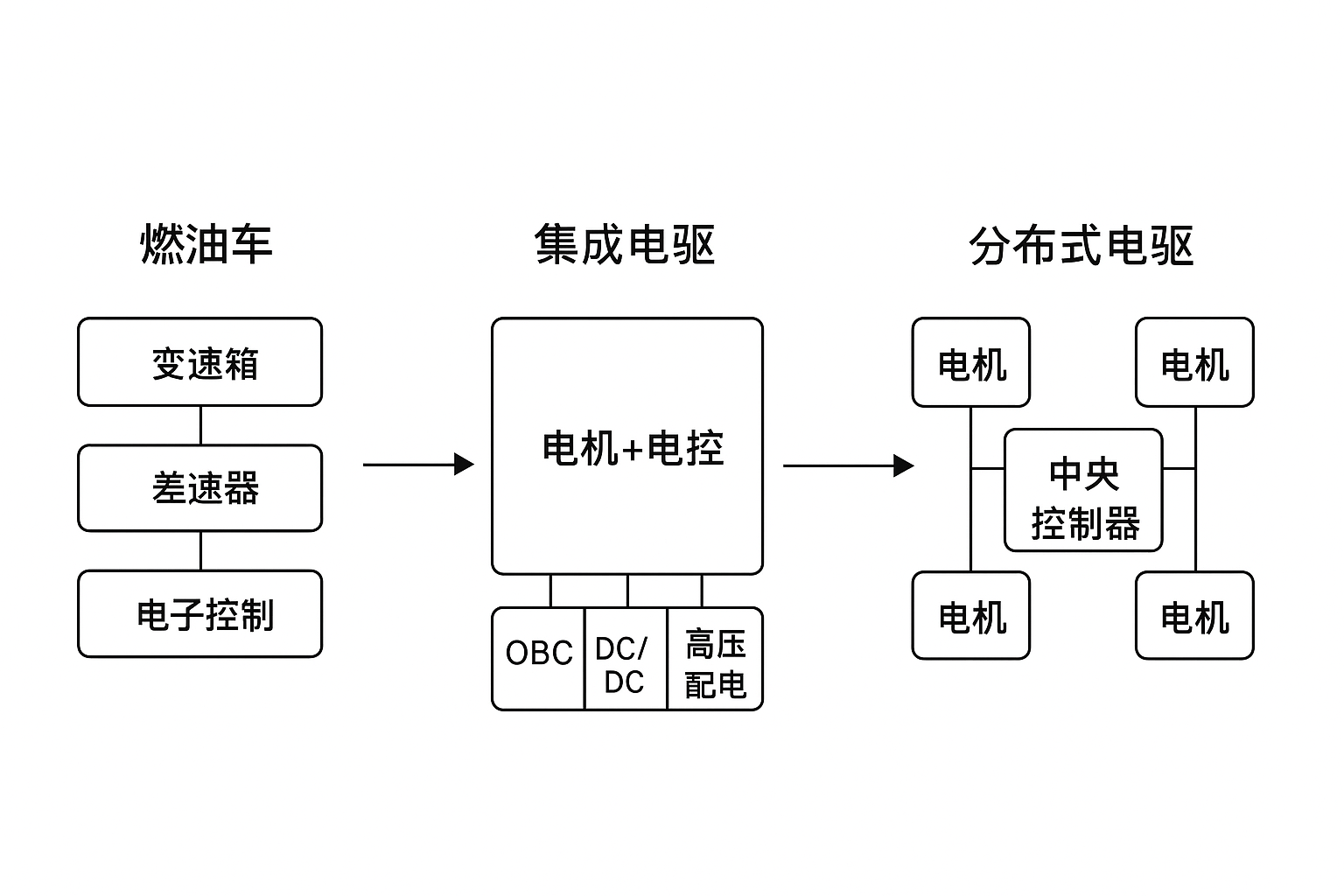
从控制的角度上看,集成化电控使得分布式电驱成为可能,分布式电驱又反过来赋能更精细的控制。传统汽车的发动机、变速箱、差速器、ABS、ESC、转向助力、制动助力等相对独立,由不同 ECU/控制单元控制,系统间的协调仅仅局限在CAN总线,协调效率有限,是个功能叠加为主的,“各管各”的分散控制系统;而电车时代的到来对于控制系统提出了更加精细化和响应快速化的要求,控制逻辑开始逐渐集中化,通过把电机控制器、DC/DC、OBC等高度集成,辅以中央控制器算力的大幅提升,我们得到了通信延迟短,系统耦合度高的“多合一”电驱,形象一点说就是控制从原来的“诸侯割据”进化到现在由一个高算力的中央“大脑”来进行统一指挥。有了高算力的中央控制器支撑,工程师们就有了新想法:既然电控已经如此强大,那为什么不能试着让同轴的两个车轮解耦开来,给每个车轮都装上一个电机,再用电控对多个轮端/轴端电机进行进行精确调控,将原本很难从源头干预的机械调控变为一项软件算法可定义的域呢?这种从依赖硬件的被动平衡,转向依赖软件的主动控制的转变,正好对应了软件定义汽车对车身各域进行精确控制的要求。

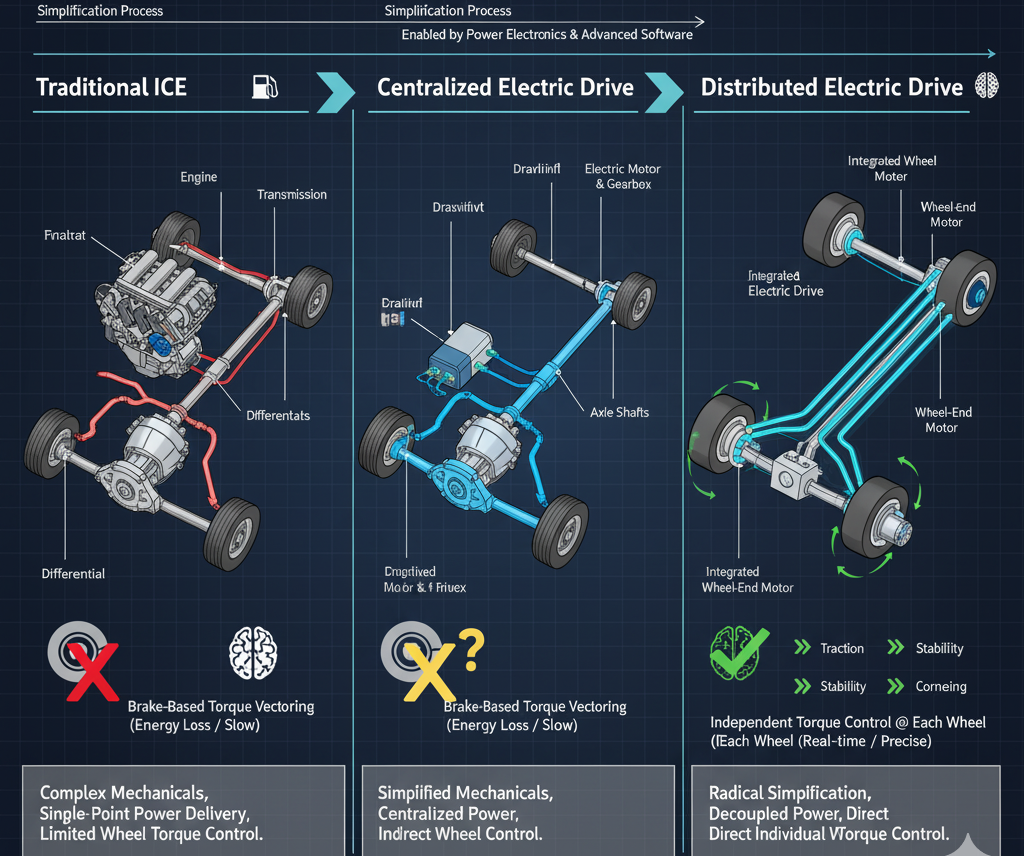
而站在动力单元或者说动力链的角度,分布式电驱也是汽车走向进一步智能化必不可少的一步,逻辑是这样的:传统的电驱动系统虽然在电动化浪潮中实现了显著简化,诸如发动机变速箱以及一系列附件在内的驱动组成不复存在,但其固有的工程局限性依然存在。首先,尽管已经全面电驱化,但动力链末端的传动轴、差速器等机械部件依然存在,甚至和油车相比并没有什么差异,这带来两个问题,一个是多级的机械传动必然意味着折损效率,另一个是多级机械的传动未必总能够适应功率转速扭矩都越来越大的电机,当然这些问题放在另一个主要问题面前不值一提,那就是这样的结构从根本上限制了对单个车轮的独立扭矩控制,从而限制了智能化时代对于车辆姿态的调节,这个问题在油车时代的中后期和集中式电驱时代的当下工程师想过用“打补丁”来解决,通常是通过刹车系统对特定车轮进行制动,从而将更多动力传递到相应车轮 。可惜这种方式本质上是一种能量损耗型、响应相对较慢的“模拟”控制,并不能适应智能化电动化时代车辆姿态的要求,而分布式电驱则能够从根本上解决这个问题,通过将动力源解耦并靠近车轮,从根本上实现了对每个车轮的独立扭矩控制的可能性,使得电控能主动干预的范围扩大到动力链条的末端,并让许多依赖精细化控制的车身动作成为了可能。
不就是加两个电机,有什么难的?
如果你曾经读到过关于分布式电驱优势的材料,那么其中一定有一条的大意是“模块化程度高,可拓展性强”这样的理论。这很容易给人造成分布式电驱其实很容易被布置在车里面的错觉,而事实显然并非如此。从车辆开发的角度来看,分布式电驱由于每个驱动单元相对独立,且都能被电控精准控制的原因,确实称得上是“架构开发的天堂”,但实际上,分布式电驱相比于集中式电驱更靠近轮端的特性使得布置的工程师不得不考虑如何让直径不小的电机与悬架刹车兼容的问题,双电机“背靠背”散热的问题以及对车辆质心的影响,这些都是妥妥工程地狱,很可能费心研发的分布式电驱到最后会面临“塞不进车”的尴尬状况。
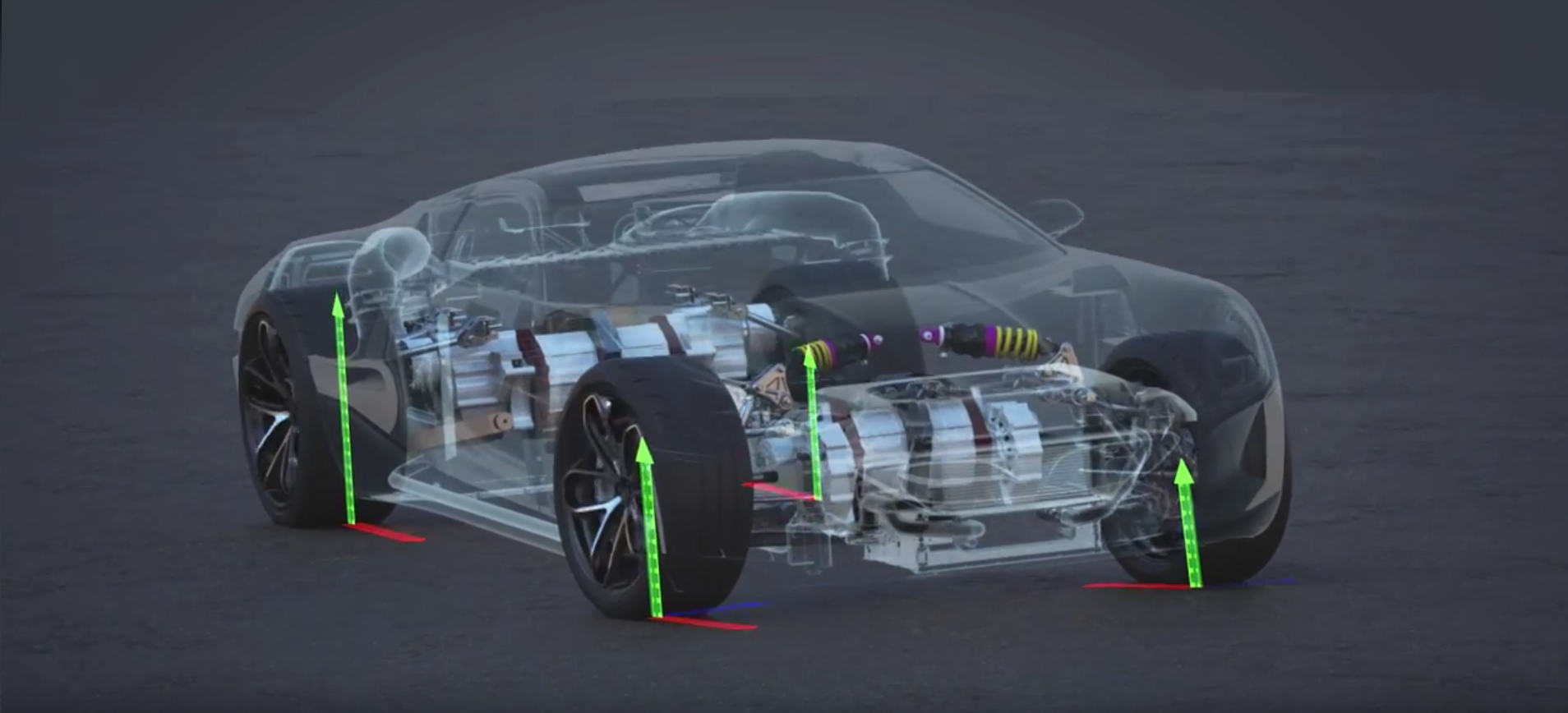
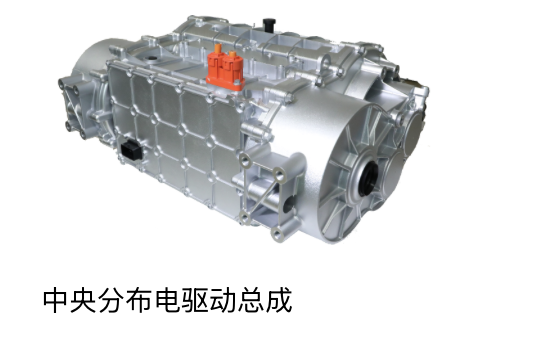
那阿维塔是怎么做的呢?从小道消息来看,阿维塔采用的分布式电驱是比较先进的同轴布局,两个电机被放置在同一个壳体内,通过两根短驱动轴各连接一个车轮,利用双碳化硅高功率元件和创新的油冷的设计将功率密度做到了超过6的同时保证了双电机的散热,从现场来看,分布式电驱的原型被塞进了阿维塔12里,且车身的姿态并没有发生明显的改变,这印证了阿维塔有能力通过提高功率密度等方式解决分布式电驱的布置问题。

解决了如何把分布式电驱塞进车内的问题,下一个问题就是如何把这套电驱控制好。事实上,一套没有经过优秀的电控控制的分布式电驱的上限还比不上集成式电驱,甚至还会产生危险,这是因为传统的机械差速器先天具备根据轮端阻力实时分配驱动力分配的能力,这是一种由物理特性决定的、不可改变的被动过程,而分布式电驱动则彻底取消了这些机械部件,这就意味着车轮间的转速和扭矩差异必须通过实时、精确的电控单元和高精度传感器进行实时、主动的软件控制,稍有疏忽就容易出现两侧轮端互相打架,分布式电驱“帮倒忙”的情况。早期一些采用分布式电驱的车型的赛道表现反而不如用传统差速器的车,甚至造成一些失控事故,就是这个原因。而要想真正把控制做好,除了前文提到的一个高算力的“大脑”以外,你至少还需要高带宽低延时多冗余的通信来解决信号传输和安全兜底、高精度IMU(惯性测量单元)和更高刷新率的轮速传感器来快速正确判断车身姿态、感知融合方案来提前预判前方路况等等。

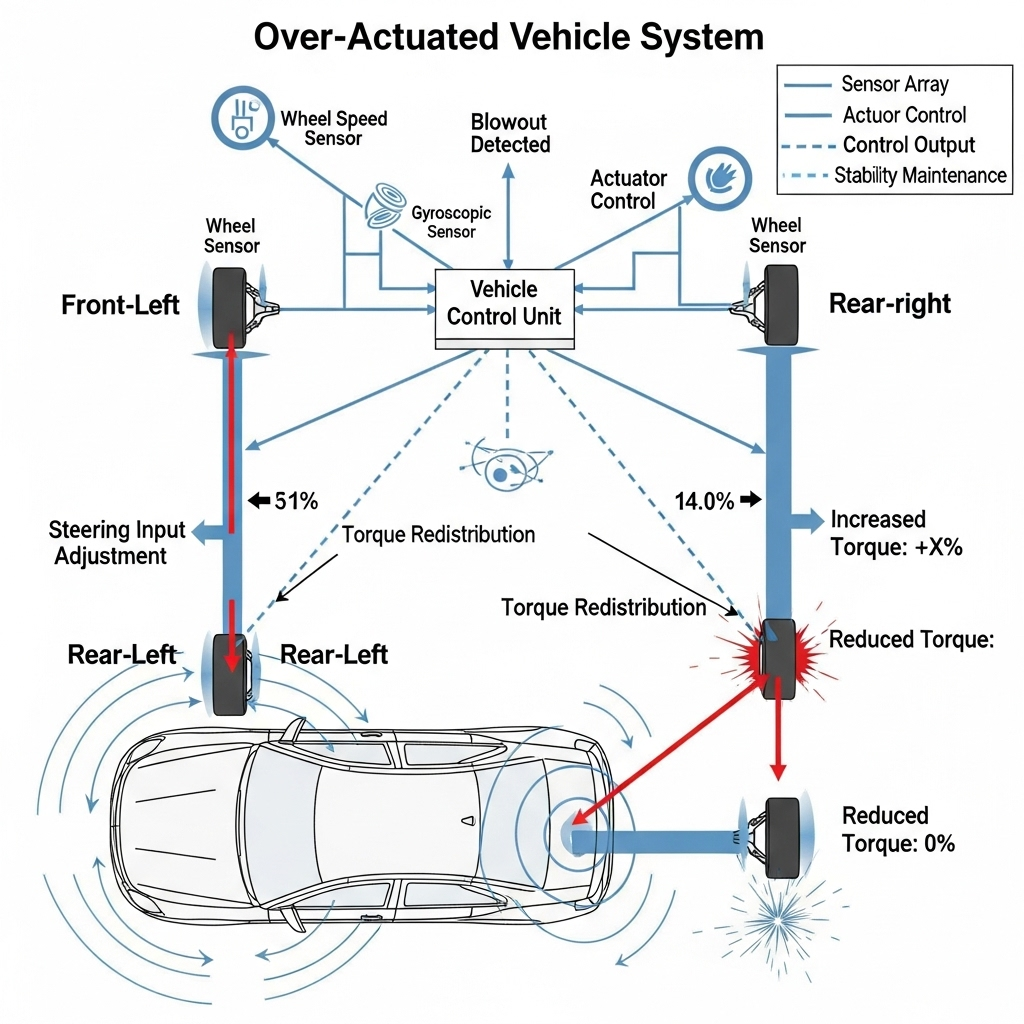
讲到这里,我们不妨用一个分布式电驱典型的营销场景来分解分布式电驱的控制过程:以发布会上展示的阿维塔255km/h爆胎测试举例,我们看到的是,车辆在发生高速爆胎之后仅仅只是车身轻微晃动并很快恢复了平衡,而事实上在分布式电驱内部发生的是:
1)⻋辆搭载的智能底盘域控制器通过轮速传感器、IMU、⽅向盘转⻆传感器等,在毫秒级别内识别到爆胎的⻋轮与地⾯的摩擦阻⼒瞬间急剧增⼤,车身随之发生偏转;
2)系统⽴即对爆胎的对⻆线⻋轮(即右前轮)施加轻微的制动⼒。这是⼀个经典的稳定性控制策略,⽬的是产⽣⼀个相反的偏航⼒矩,来抵消爆胎带来的甩尾趋势,为后续的电驱补偿争取时间和稳定⻋⾝姿态:
3)系统指令驱动爆胎⻋轮的电机(左后电机)⼤幅降低或直接输出负扭矩,以抵消因爆胎⽽产⽣的巨⼤滚动阻⼒矩,消除“拉扯感”,同时,系统会瞬间重新计算并调整其他三个健康⻋轮的电机输出扭矩,使车身重新稳定。
整个过程的动作时间单位是以毫秒计算的,车身姿态的捕捉、指令的决策与执行,执行后的再反馈这一整个闭环的每一个环节环环相扣,只要出现一点差错,都可能导致悲剧。分布式电驱的理想和现实之间,隔的全是主机厂成体系的协同开发能力,没有硬实力,是绝对造不好分布式电驱的。


阿维塔看中了分布式电驱什么?
如前文所言,分布式电驱背后是一个复杂精妙的庞大控制体系,但如果工程师们费尽心机研究分布式电驱仅仅是为了“取代差速器”和“解决电控精准控制轮端的可能性”这两点,那未免有些“不够性价比”,分布式电驱一定得有它先进的运用场景,才会使得包括阿维塔在内的车企投入大量资源研发,而这主要涉及到两点:分布式电驱系统对车身动态控制的革新以及更高阶自动驾驶对车辆平台的要求。
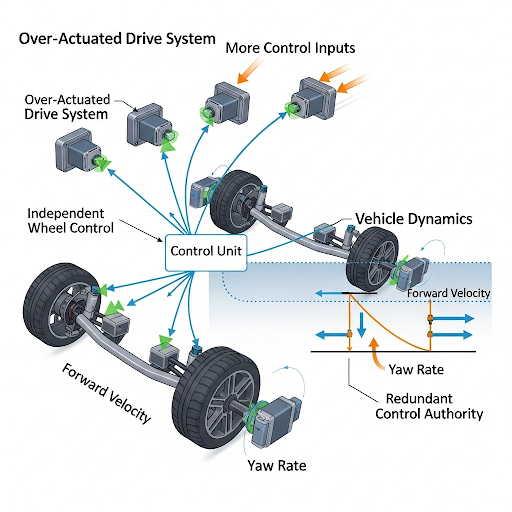
首先是安全冗余的革新,分布式电驱系统在控制领域的视角下是典型的过驱动系统,所谓过驱动系统,指的是执行器数量大于控制自由度的系统,说直白一点就是,车辆的主要的控制目标无非3个:纵向加速度(走直线)、横向运动(转向)、横摆角速度(yaw),而分布式电驱车辆的执行器却有4个(4个电机),因此实现同一个控制目标在分布式电驱这里就有了多种实现路径,还是拿爆胎控制举例,车辆高速直线行驶下的控制目标显然是走直线,而突然一个车轮的爆胎造成了一个执行器(电机)的失效以及车身姿态的改变,如果是集中式电驱,这个时候只能依赖ESC进行有限的调控,而分布式电驱应对这种场景不仅能化险为夷,甚至还有多种实现路径(既可以减少部分车轮的扭矩也可以增大部分车轮的扭矩来实现总体平衡),这对于整车的动态安全的帮助是显著的,也符合包括阿维塔在内的中国新豪华品牌对于安全性的追求。
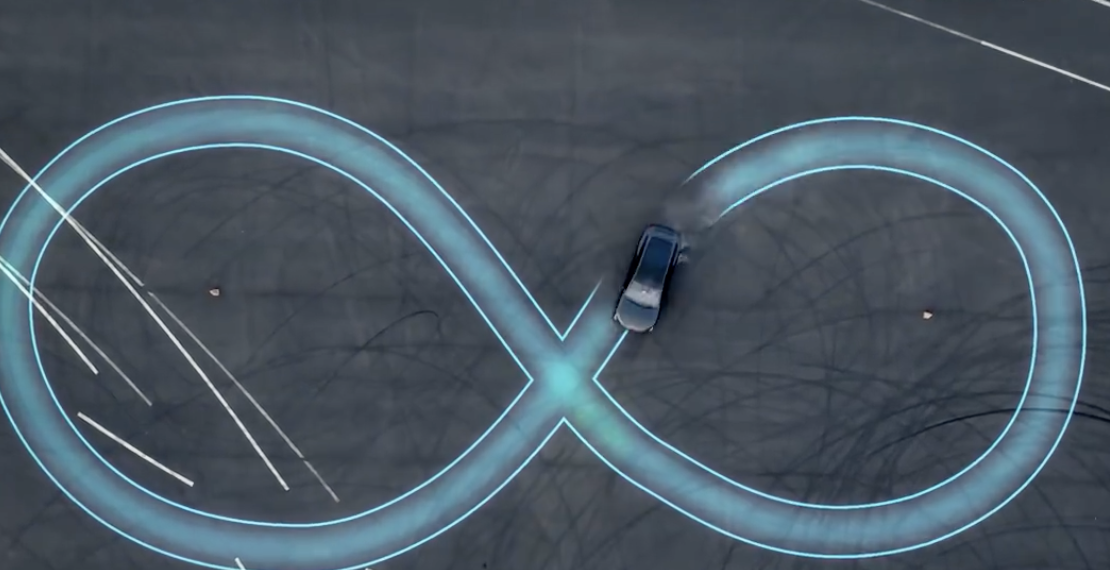
其次是控制场景的革新,传统的集中电驱并不支持工程师利用对电机的控制实现一些“骚操作”,而分布式电驱由于可以独立对每个车轮进行控制就能实现许多传统电驱没有办法完成的矢量控制,这里面大家最喜闻乐见的就是原地掉头,而阿维塔这次基于分布式电驱则玩出了新花样——自动漂移。所谓自动漂移就是通过精准的四轮扭矩控制,让前轮两个电机产生转速差辅助带起后轮突破抓地力极限,后轮同时加扭矩输出完成起漂,在漂移维持过程中系统会通过传感器(IMU、轮速传感器、⽅向盘转⻆传感器等)实时监控⻋辆的横摆⻆速度、侧滑⻆、⻋⾝姿态,以每秒上千次的频率调整四个电机的扭矩,精确控制⻋尾滑动的⻆度和⻋辆的⾏驶轨迹,让车辆持续且稳定的处于漂移的状态下,这个模式可以让任何人都快速享受到漂移的乐趣,甚至相比于传统漂移,得益于电机的精确控制,对于轮胎和传动系统的压力损耗反而更小,在现场我们还看到了打通分布式电驱和辅助驾驶系统的“无人漂移车”依赖辅助驾驶对方向控制的控制和四电机的自动漂移能力,实现了完全无人的自动漂移。

看到这里,你可能会觉得自动漂移这个功能离普通人的使用场景相去甚远,事实也确实如此,但是分布式电驱对车身的控制远远不止极限状态下的冗余和原地掉头这样的花活,它对于常规动态驾驶的帮助也是显著的。尤其当你意识到阿维塔的下一台重磅车型是一台大尺寸SUV了之后,事情就开始有意思了起来。众所周知,车重已经成为了车辆动态调教不得不考虑的问题,而为了让这些动辄两三吨的“大象”转起弯来更灵活,分布式电驱还能贡献自己的力量,在机械抓地力与空间和续航难以两全的背景下,分布式电驱依托矢量控制能力可做到“四轮独立驱动”,甚至四轮独立的正/反扭矩,能实时修正因车重导致的转向不足/过度,以轮为单位最大化精细利用机械抓地力,并在需要车身快速响应的场景,通过外后轮补扭矩、内前轮削扭矩实现类似“力矩转向”,补偿重车的操控极限。可以说,分布式电驱极大改善了重车的操控性,让其他部位的“堆料”成为可能,也许在阿维塔的下一台大SUV上,我们能看到分布式电驱直接或间接带来的新惊喜。


最后,也请别忘了,阿维塔也好,其他友商也罢,对于更高阶的自动驾驶的追求是从来没停过的,而要想实现L4或L5级别的自动驾驶,功能安全和架构冗余必不可少。反直觉的是,传统的机械液压结构很难实现有效的冗余,反倒是线控结构能够实现足够的系统冗余,保障自动驾驶车的安全,而分布式电驱,正好就是全栈线控的重要组成部分。也许在未来我们会看到越来越多的分布式电驱装车,而根植于无数人心中那个自动驾驶的愿景的实现,也少不了分布式电驱的功劳。

9月9日,一汽-大众全新一代速腾L在成都正式上市

比亚迪“大五座天花板”方程豹钛7火爆上市,售价17.98万元起

方程豹钛7上市,推出4款配置,售价17.98-21.98万元,配置越级,权益丰富,主打家用硬派,满足多样需求。

比亚迪“大五座天花板”方程豹钛7火爆上市,售价17.98万元起

9月9日,一汽-大众全新一代速腾L在成都正式上市,新车推出300TSI时尚版、300TSI精英版和300TSI豪华版共计三款车型,热气腾腾价11.49万元-13.19万元。值此一汽-大众即将达成3000万辆的历史时刻,购买全新一代速腾L限时赠送保险礼遇,现金补贴4000元。

比亚迪“大五座天花板”方程豹钛7火爆上市,售价17.98万元起

11.49万起!一汽-大众全新一代速腾L正式上市
新车推出300TSI时尚版、300TSI精英版和300TSI豪华版共计三款车型,热气腾腾价11.49万元-13.19万元。
9月9日,一汽-大众全新一代速腾L在成都正式上市,新车推出300TSI时尚版、300TSI精英版和300TSI豪华版共计三款车型,热气腾腾价11.49万元-13.19万元。

9月9日,一汽-大众全新一代速腾L在成都正式上市

9月9日,一汽-大众全新一代速腾L在成都正式上市,新车推出300TSI时尚版、300TSI精英版和300TSI豪华版共计三款车型,热气腾腾价11.49万元-13.19万元。

17.98万起售的大五座SUV天花板,方程豹钛7震撼上市
9月9日,一汽-大众全新一代速腾L在成都正式上市

比亚迪“大五座天花板”方程豹钛7火爆上市,售价17.98万元起

曜启东方,遇见中国星,中国星全新东方曜预售价9.97万元起
9月9日晚,一汽-大众全新一代速腾L在成都正式上市,新车推出300TSI时尚版、300TSI精英版和300TSI豪华版共计三款车型,热气腾腾价11.49万元-13.19万元。值此一汽-大众即将达成3000万辆的历史时刻,购买全新一代速腾L限时赠送保险礼遇,现金补贴4000元。

买15万左右的SUV,你是不是总纠结“想要智驾却得加钱,标配的又不好用”?堵车时想有辅助跟车,找车位盼着自动停,可以前这价位的车,要么智驾是顶配专属,要么功能聊胜于无。9月8日深蓝秋季新品发布会上,全新深蓝S07一预售就破了局——它是15万级唯一全系标配华为乾崑智驾ADS SE的......

9月5日,全新问界M7正式开启预订,预售价28.8万起,即刻下订还可享2000元抵5000元购车尾款减免。
以中国研发、德国制造、全球销售为路径,追觅汽车正在以“追觅速度”快速落地。官宣仅10天,追觅汽车的全球化进程再次传出了新消息。 9月8日消息,追觅科技创始人兼CEO俞浩携团队赴德国,为追觅汽车进行工厂选址,这是中国科技企业首次在欧洲高端制造腹地落地综合性工厂

方程豹钛7火爆上市,售价17.98万元起












































 京公网安备 11010102004670号
京公网安备 11010102004670号