
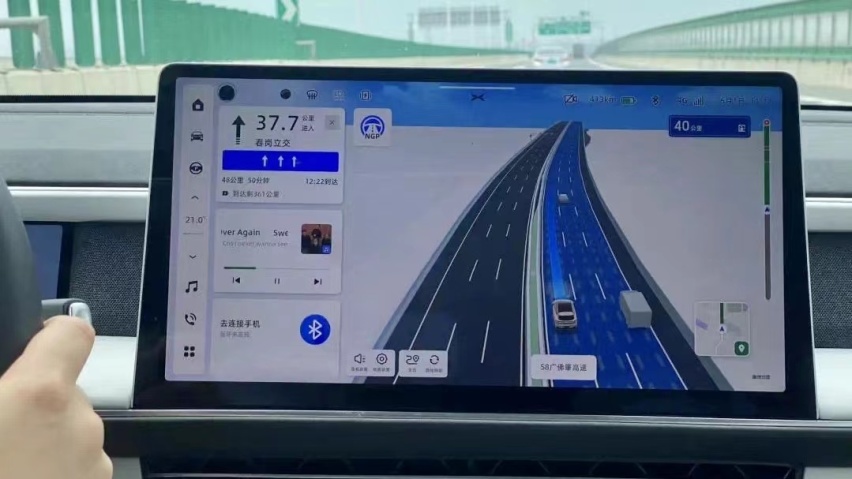
小鹏G6搭载了“AI代驾”,人工智能会学习和存储指定路段的行车路线,实现家到公司点到点的辅助驾驶;理想最近在开发通勤NOA功能,也是把上下班路线存储好,就可以实现自动辅助驾驶;华为的NCA辅助驾驶系统中,也有类似的功能。这种特定场景的NOA辅助驾驶,已经是继城市NOA的大概念后,车企们卷的更细的功能了。

在自动驾驶依然无法大规模落地的背景下,车企们给消费者以及整个市场画下的饼,迟迟难以实现,而辅助驾驶这条已经卷到飞起的赛道,一直都被L2级束缚住,短期内可能难以向上再突破,那么如何给市场和消费者们一个还算能说得过去的交代呢?于是这类特定场景的NOA辅助驾驶功能,开始迅速铺开。

可以说在这个阶段推出通勤NOA等功能,就是车企们的无奈之举,如果大家常关注这些新势力们的辅助驾驶系统的动向,会发现大家其实在硬件方面大家已经拉不开什么差距,功能的上限标准也摆在那里,不能达到L3,所以只好在L2+的范畴中,进一步地内卷。
而通勤等固定路线的NOA功能,也是驾驶者最常遇到的场景,同时通勤路段也是让驾驶者们最容易造成疲劳的场景,如何解决这一痛点问题,车企们都给出了不同的解题思路,当然大家也可以把它当作自动泊车功能来看待,自动泊车解决泊车场景痛点,通勤NOA解决通勤的疲劳重复问题。

比如通勤场景的辅助驾驶,是城市全场景辅助驾驶中的细分场景,目前新势力车企们在做这类功能时,往往还会依赖高精地图,虽然高精地图的弊端比如更新慢、鲜度低的问题大家都很清楚,但是架不住它真的好用,初期搭建功能依然离不开高精地图,而后再通过BEV+各种不同命名的空间网络技术,逐渐降低对于高精地图的依赖程度。
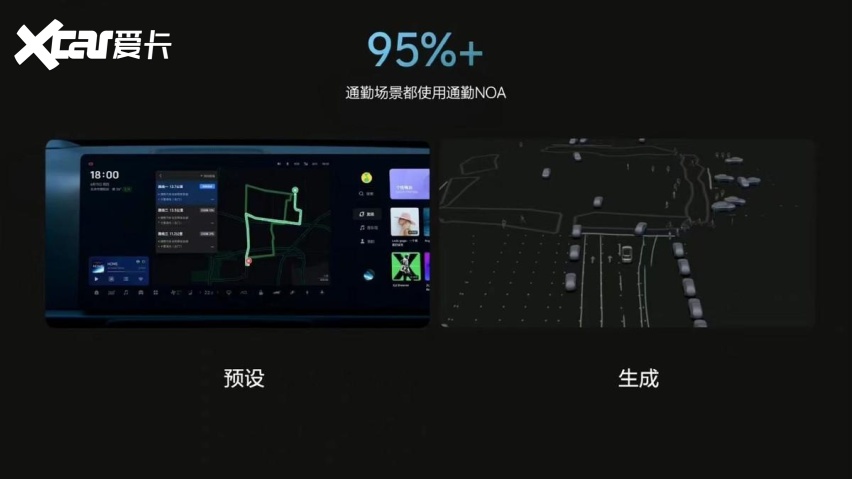
相比全场景的城市辅助驾驶,通勤场景有着高重复性,时间线路都比较固定的特点,所以对于车企来说,会有相当多可以汇总在一起的相同类型数据可以进行分析。

比如理想的通勤NOA功能,前期还需要人类驾驶员来驾驶车辆,实现家到公司的点到点驾驶,与此同时车辆会通过车身上的感知硬件,以及地图数据来感知和记录途经路段的信息,再提供给理想的NPN神经先验网络算法,来进行提取、调用和学习。
小鹏的“AI代驾”可以通过短时间分析用户日常高频场景(比如通勤路段等其他相对固定的线路),学习用户驾驶风格,由此可以实现私人定制路线,达到更高的通勤效率。
这其实就是把人为的驾驶信息,通过系统的自学习,把一些相同类型的数据进行归纳,系统会对于这些路线更为熟悉,基本上只需要一周时间,系统就可以训练好一条常用的路线,复杂路线的训练时间可能达到两周及以上。大家可能会想了,我这可能就只有十几公里的路,车企们那些有着非常高算力,而且还有自动标注等先进技术的加持,为何还要一周时间?
这其实已经是属于定制化的智能驾驶功能了,车企们之前发布的大部分都是一整套方案,可以复刻到每一台车上,但这种个性定制化的功能,就需要额外的算力来服务了,再加上同一时刻可能会有几千种通勤路线在优化,这背后也有着相当可观的数据量。
目前之所以自动驾驶或者全场景的辅助驾驶还难以完全推广开,车企们还在卷特定场景NOA,与目前全场景辅助驾驶所面临的3个关键问题不无关系。目前技术挑战主要有3方面:首先是现有的算法,不足以支撑复杂场景的功能和性能;其次是现有硬件有效算力和设备带宽,不足以支撑最先进的算法和大模型;最后是现有软件架构,不足以支撑高度自动化的快速迭代,使得整个开发成本高,开发周期长。

为什么海外的特斯拉FSD Beta敢开通全场景的功能,甚至于“埃隆模式”都不需要人为干预了,这与特斯拉的算法架构有着很大关系,特斯拉的算法以及感知技术架构,一直是行业的领头羊,它新用到了技术,新势力们也会去快速跟进,但是大家的步伐总是没有特斯拉快,这是不争的事实,特别是特斯拉FSD目前已经用上了端到端架构,和其他车企们已经又错开了一层。

其次,大家会发现如今的绝大部分有高阶辅助驾驶的车企,它们的辅助驾驶核心算力几乎没有低于200Tops的,基本上都在500Tops以上,甚至破千,但是真正的有效算力,也就是能用得到的算力其实并不多,因为其实车企们在开发过程中为了增大算力冗余,所以都把数据做的很好看,但是真当需要高算力冗余来带动新算法模型时,这些算力翻到激活不出来,就像发动机马力很大,但是变速箱拖后腿一样。

而由算力平台的承载力不足,又会带出接下来的问题,也就是新的技术、算法、模型真的来了,很难实现低成本的快速进步迭代。
以上这些就是目前全场景NOA所面临的问题,而去卷特定场景的NOA,会让场景更加聚焦,面对上面所说的那3个问题,特定场景NOA会让车企面临的难度降低很多,而且功能体验优化起来,也会让用户们的感知度更强。
特定场景的辅助驾驶(比如通勤NOA)所带来的体验,会比较接近L3级自动驾驶的体验,因为L3级本来就是有条件的自动驾驶,而车企们把条件限定在了通勤等重复度较高的场景,其实可以说是顶着面前规则的上限,来给用户尽可能多的体验。

文中提到的目前城市辅助驾驶所面对的3个大问题,是全行业目前都要面对的,虽然像特定场景辅助驾驶这类功能,可以尽可能地避免这3个问题,但也会带来新的问题。
车企们现在大多做的还是一个一个场景的优化,而后把它们归拢起来形成多场景的辅助驾驶,而城市通勤场景也是其中的一个或者多个组成部分,虽然能够做到对于一个场景的完整优化,但是场景还是一个个割裂开的,短期内无法形成一个完整的链条。而特斯拉FSD的端到端架构,已经把感知决策输出做成了一整套模型,这个我们前面的文章有大篇幅的解读,而蔚小理们现在还在做这些割裂开的场景优化,可能已经又落后了。

破解看不清、易晕车、不贴合难题,小鹏华为联手打造世界最好的AR-HUD

两款车配1.9万座充电站,比亚迪真能吹?友商:它把我算计进去了
比亚迪重拳打击网络黑公关 公布多起维权成果并持续重金悬赏线索

兆瓦闪充只在4S店?比亚迪祭出大手笔,“只充不建”被一招解决

强强联合,小鹏与华为联合研发,这个HUD抬头显有点猛!

汽车不让降价了,谁高兴谁难受,这个问题很棘手
6月4日,比亚迪法务部发文公布近期多起维权成果,网络账号“周浩然Sean”因诽谤比亚迪操控自媒体诋毁同行,经法院判决构成名誉侵权,须公开道歉并赔偿10万元

增程式动力究竟落不落后?哪家混动更省油?

据数据显示,方程豹汽车销量持续猛涨,已跻身新势力周销量TOP8。作为比亚迪旗下个性化品牌,方程豹现已推出豹5、豹8、钛3三款车型,累计交付已突破十万台,而达到这一成就,方程豹仅用时18个月。

17万公里老车当众拆解,风云A8较真上市7.99万元起
重组合并失败?长安升级为一级央企,与东风平级

超级e平台技术解析暨汉L唐L“兆瓦闪充”石家庄巡回体验

【2025年6月5日,广州】 今日,小鹏汽车联合华为智能汽车解决方案发布世界最好的车载AR-HUD——「追光全景」抬头显示,这是全球首个真正融入AI智驾的HUD解决方案,也是视觉效果最好的AR-HUD。发布会上,小鹏汽车副总裁、产品运营中心负责人陈永海表示:HUD的最大价值是对人......

刷新了20万元以上纯电市场的技术标准,推动主流中高端纯电进入兆瓦闪充、油电同速的新时代
网络不是法外之地,比亚迪这次重拳出击,让黑公关无处可藏!

破解看不清、易晕车、不贴合难题,小鹏华为联手打造世界最好的AR-HUD

6月5日,小鹏汽车联合华为智能汽车解决方案发布世界最好的车载AR-HUD——「追光全景」抬头显示,这是全球首个真正融入AI智驾的HUD解决方案,也是视觉效果最好的AR-HUD。发布会上,小鹏汽车副总裁、产品运营中心负责人陈永海表示:HUD的最大价值是对人的引导,强化引导价值、解决......

17万公里老车当众拆解,风云A8较真上市7.99万元起!

山城大舞台已就位,未来座驾先睹为快 下
闪充5分钟,续航400KM,汉L唐L充电实测超级e平台实力










































 京公网安备 11010102004670号
京公网安备 11010102004670号