
2021年3月,雷军推出了小米首款折叠手机MIX FOLD,也正式宣布了要跨界造车,这一年,华为也带来了Mate 40系列,已经成立两年多的华为车BU,推出了华为乾崑智驾的第一代版本,华为ADS 1.0。三年后,华为智驾版本已经迭代了2次,小米汽车也迎来了第一次城区NOA升级,从实测体验看,智驾整体的逻辑趋于人类驾驶员,效果似乎非常接近华为ADS 3.0,如果从小米SU7的上市时间开始算,将近7个月,就几乎赶上了华为在过去一年的迭代水平,那么问题来了,这一次,小米智驾新版本的实力究竟如何?有没有可能在明年追平华为?
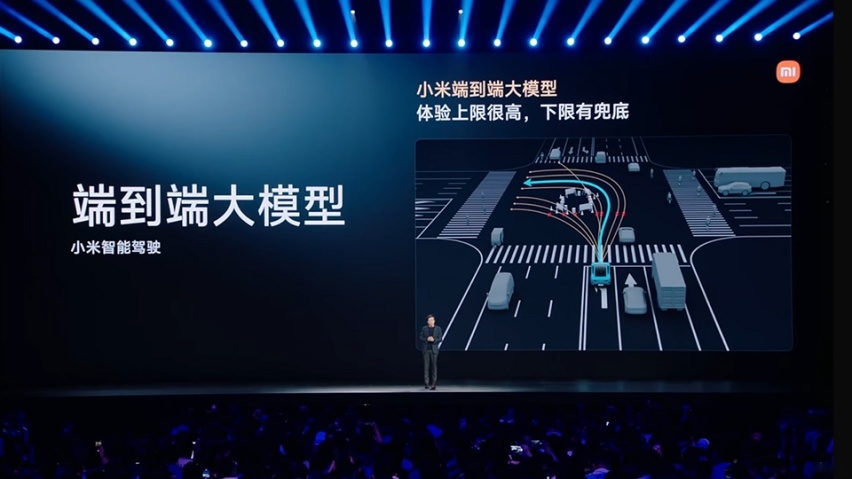
在聊小米汽车城区NOA 1.4.0的效果之前,我们有必要先简单复盘一番小米汽车的端到端大模型。现阶段国内几乎所有涉及高阶自动驾驶技术的车企,都从分段式网络切换到了端到端一体式大模型,具体的技术逻辑这里不再赘述,简单说,就是不用再给控制端写代码规则,把感知端和规控端融合成一个大模型,目的就是减少数据传输的时间,在面对发生过的事情时有经验处理,面对没发生的事去学着处理,这是一个主动学习的过程,最终让系统实现“看到就执行”的效果,小米的智驾技术也是如此。

从底层逻辑看,其实和理想汽车的One-Model结构非常相似,都是端到端+视觉语言模型(VLM),也是用到了2枚算力508TOPS的英伟达 Orin-X芯片。不同的是,小米汽车在BEV网络上用到了变焦技术,也就是可以在感知层面做到动态调节,当在比较考验精度要求的窄路或者停车场时,像素网格大小会调整到0.05米,而在相对宽阔的场景下,这个尺寸会扩大到0.2米,这也是能够实现双向十车道无保护左转的基础条件,理想汽车虽然没用上变焦BEV技术,但是基于快慢两套系统之外,实际上比小米汽车多了一个云端世界模型,当系统遇到无法解决的问题时,会将采集记录后的数据上传,在云端将问题场景进行二次搭建,让大数据分析问题根源之后再针对性进行训练,学习后再交给端到端处理,总之三套模型之间是相互辅助的关系,这两套智驾系统比起来,在不同场景下都有各自的优势。

在上一代的智驾版本中,有不少车主给到的反馈是,复杂路口的处理相当谨慎,人车混行之下接管频次较高,其实相比后期对硬件层面的调整,这类属于软件层面的问题通过OTA做优化更容易解决,在智驾框架思路确定之后,接下来更多的工作就是不断再去优化细节。所以在这一次的新版本中,特意强调已经优化了功能升降级逻辑,对车辆和行人的速度检测也进行了优化,目的就是避免再出现遇到人车流量大的交错路口,系统算不准合适的起步时机只能主动降级。

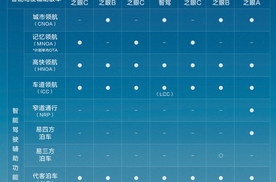
在新版本中,多了U型路的掉头能力,更据交通信号灯指令能够自主通行,在无前车的路口也能通过,支持对静态占道的临停车、锥桶、三角架等障碍物绕行,从目前多数实测的体验来看,新版本在复杂路口的通行轨迹和细节确实更加趋于拟人化,比如,在变道逻辑中,目前市面上大多智驾系统普遍的做法是,提前开启转向灯,在合适的契机再插入规划道路,而这次小米汽车的新版本,是确保和后车具备安全距离,并确定后车的大致运动轨迹之后,几乎在执行转向的同时开启转向灯。再比如,在无保护左转弯逻辑中,新版本不会按照前车的运动轨迹跟车行驶,而是会向左多打半圈,绕到前车侧后方的“安全区”,巧妙的利用前车的位置,躲开了和对向车辆、行人或者非机动车的混轮博弈。

这两个细节的提升,可以说基本解决掉了绝大多数变道转弯的难题,不过这一代版本也有需要提升的地方,比如,通行效率的优化程度还不够,由于系统在复杂路口做了较多的安全冗余,整体反映会显得稍慢一些,在丁字路口已经出现合适的起步契机时,系统识别到了后方有正在移动的障碍物,所以还在考虑是否继续行径时的几秒钟,错过了本可以直接通行的机会,尽管在复杂路口系统降级的次数变少了,但通行的效率依然不够高。
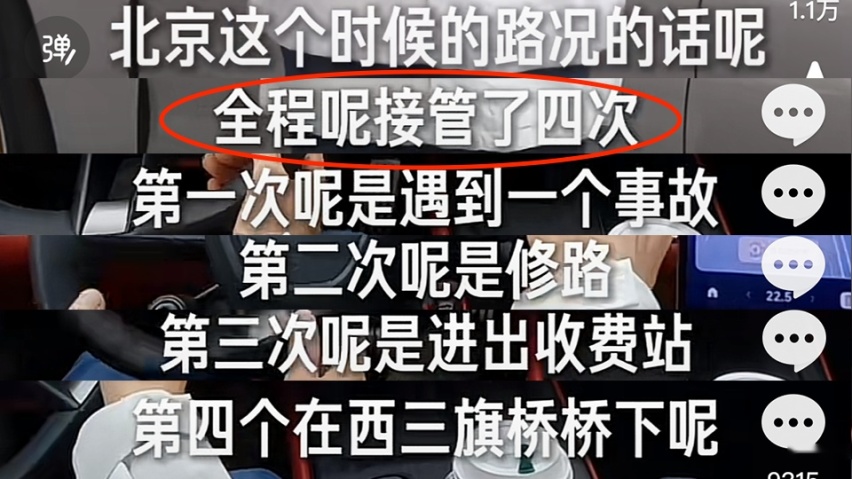
另外,当行驶至道路中央有静态车辆占道时,系统并不是全部都会采取绕行,即便是道路划线非实线,系统也会提示需要接管,但是在变道、转弯时,多数情况又可以实现流畅的绕行,这个差异显然是决策还不够“成熟”,一部分原因也可能是小米SU7的交付量还在增加,数据积累量还不够多,雷军在最近一次的城区NOA体验中也提到了,在北京50公里左右的城市道路,全程出现了4次接管,原因分别是遇到了事故无法绕行、修路施工、排队进出收费站和人行桥下遇到强加塞,所以不出意外,在下一个版本中,这些细节可能都会被优化。
从小米汽车新版本的城区NOA效果来看,其实很大程度上,可以说已经非常接近理想汽车的6.4版本了,也相对接近当时还没把BEV融到GOD网络的华为ADS 2.0。那,明年有机会追平ADS 3.0吗?

答案是大概率可以实现。首先,我们从感知硬件来看,现阶段要实现华为ADS 3.0满血功能,是需要1颗激光雷达(192线)、3颗毫米波雷达(一颗4D)、11个摄像头和12颗超声波雷达,在不同感知硬件的数量上,实际上小米汽车也是如此,只不过,激光雷达用的还是禾赛提供的128线(同款理想汽车),在探测距离上比华为自研那枚少了50米,另外小米没有搭载4D毫米波雷达,华为用的来自硕贝德,探测距离在280米,而且擅长捕捉不规则异性障碍物,通过回波将采集到的数据建立立体坐标,再配合实时扫图的192线激光雷达,可以说这套组合把GOD大网的优势全部能挖掘出来,这也是为什么,华为在今年10月25日,只是发布了对细节优化的ADS Pro V3.1版本,而不是发布4.0的原因之一。

理论上讲,96线、128线和196线,线束越多,探测的精度和精度自然越高,而且目前车规级激光雷达产业的价格已经降到了千元级别,小米汽车似乎没有理由不更换高线束的激光雷达,为什么还会用禾赛的128线呢?这是因为,高线束激光雷达本就会占用一部分算力资源,而华为ADS 3.0的芯片算力已经做到了1000TOPS,小米汽车用的2颗英伟达 Orin-X芯片,叠加后算力虽然只有508TOPS,但分给128线激光雷达的资源空间足够用,而这其中最关键的就是,小米汽车只要不放弃BEV技术,就不需要高线束激光雷达。

BEV网络的特点,就是将整个场景给障碍物码上坐标,然后再对每个障碍物单独去做运动轨迹分析、预判,前面已经提到,小米汽车还用上了变焦BEV技术,就是为了把不同场景的精度做好,并且BEV网络对算力的要求远不如高线束激光雷达,这在一定程度上可以说是给VLM让出了一大部分算力资源,而针对道路细节的感知任务,在华为ADS 3.0体系里是由4D毫米波雷达负责的,所以,这样一来,华为的GOD+PDP和小米的端到端+VLM,就形成了两类截然不同的技术路线,底层逻辑看似相同,但是感知层面需要的储备却是不同的,至于二者的大模型能力,目前都已经具备了从周更升级到日更级别,所以接下来要做的,就是比拼数据积累量了,毕竟实测有效数据越丰富,学习训练后的大模型才会更“聪明”。最后也就能给出一波预测了,小米SU7上市7个月就几乎做到了华为用一年升级的ADS 2.0水平,随着后续交付量和数据的提升,估计很快下一代版本就会发出,追平ADS 3.0,大概率明年会实现,若是参考小米首次推送的节点(今年6月)来看,不排除明年6月也会发布新版本,这距离追平华为的时间,还剩下8个月。
账期缩至60天,多家车企表态,中国汽车对“长账期”说不!

“常压油箱”“车圈恒大”质疑没完没了?比亚迪硬核回应成焦点

王传福强调“不拉踩对手”是比亚迪企业原则

智驾市场格局生变,比亚迪凭超 23 万辆销量强势领跑
吉利、比亚迪等多家车企承诺账期60天以内
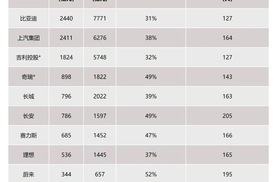
近日,汽车行业智能驾驶领域再掀波澜。有相关媒体平台公布了令人瞩目的 5 月智能驾驶辅助系统车辆的销售数据,其中比亚迪的智能驾驶辅助车型销量一举达到 231,059 辆,在国内市场占比飙升至 79%,成为行业焦点。这一成绩不仅凸显了比亚迪在智能驾驶领域的深厚底蕴与强大实力,也表明消......

奇瑞实现全品类的最后一环是皮卡, 曾被遗忘的威麟,愿助其一臂之力!

比亚迪常压油箱就是减配
汽车产业链的自我救赎。

上市一个月销量破万,吉利银河星耀8卖爆了
方程豹周销量跃居新势力第四,A级纯电SUV爆款钛3持续热销

用钛合金的三种表面形态打造一辆方程豹钛3
凌晨!比亚迪重大宣布!
每每说到央企,给人就是有钱有背景的印象,但是因为身份特殊,没法像民营企业那样放开手脚去发展经营,特别在汽车行业这种现象更为严重。

如果只有几万块的预算,想要一台既能满足低成本出行,又希望设计、配置、空间、驾驶、长续航等方面都能出色兼顾,还能带来点情绪价值的纯电SUV,这可能吗?来了解一下刚刚上市的纳米06吧

超百台梦想家护航!岚图连续两年成为夏季达沃斯论坛赞助车辆

岚图汽车:连续两年闪耀夏季达沃斯,展现中国新能源实力

奇瑞QQ家族再添猛将,三款新车上市,覆盖5-8万级纯电市场

生意人苦账期久矣,但更多人反问“真的能落实吗?”,足以看出他们的心态。

大容量储能“最优解”!宁德时代率先量产587Ah电芯










































 京公网安备 11010102004670号
京公网安备 11010102004670号