2月24日上午,当人形机器人公司的机器人“青龙”手中接过一台RoboSense速腾聚创的激光雷达E1R,也就是RoboSense速腾聚创下线的第100万台激光雷达,一个“数字化”意味的事件定格了。
“激光雷达已全面进入数字化时代。”这是RoboSense速腾聚创CEO邱纯潮在2025“Hello Robot”发布会上,提出的宣告。邱纯潮还表示:“在全面数字化之后,激光雷达已经收敛到一个成熟稳定的架构中,即将在汽车、机器人与无人机市场加速渗透和普及。”
不过,被全视觉路线逼到墙角的激光雷达还有戏吗?还有,怎么才叫数字化的激光雷达呢?
从模拟信号到数字信号
从光的波粒二象性来说,数字化的激光雷达就是用数字方法检测和处理光子信息,而不是此前的用连续“波”探测。从波到光子,这是一个质的飞跃。这相当于照相机从胶片机进化到数码相机。
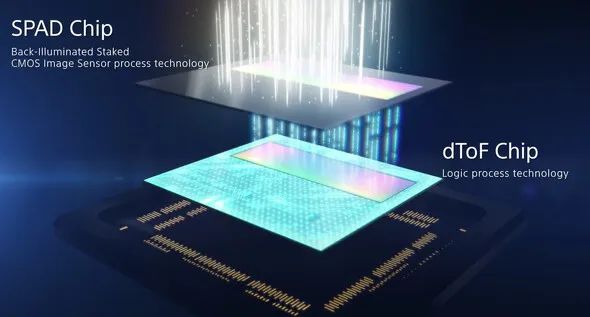
核心环节,在于采用能以单光子形态检测激光的“单光子雪崩二极管”SPAD(Single Photon Avalanche Diode)。理论上而言,SPAD拥有“无穷大增益”。
SPAD的工作原理是,当一个光子被探测器吸收后,能够触发一个雪崩效应,产生一个可以被检测到的电信号。然后,在接收端直接输出数字信号,达成信号感知的数字化。目前的行业水平,单光子探测器的探测效率在10%左右,后续这个数值应该能逐步提升到20%、30%。
这种高灵敏度的光电探测器件,能够在非常低的光照水平下检测单个光子。而且,省去了“模拟-数字”转换过程,提升了分辨率、精度、集成度以及感知融合能力。同时,也避免了模数转换过程中可能引入的噪声、失真和量化误差等问题,有效保障信号传输的完整性和处理的准确性。
另外,SPAD芯片的采样时间分辨率可达到几十皮秒级(1万亿分之一秒),这对以检测飞行时间差为基本工作原理的激光雷达而言至关重要。
换句话说,无论是此前的主流探测器APD,还是当前的主流探测器SiPM(硅基光电倍增管,Silicon photomultiplier),输出的信号都是模拟信号,而SPAD输出的则是数字信号。
不仅如此,SPAD输出的数字信号的处理、储存、乃至激光器件的控制,均可凭借算法集成到芯片上进行,在提高运算效率的同时,降低了对物理零部件的依赖。

而此前,模拟信号的信息采集往往需要复杂的多颗独立芯片精密配合,成本高、体积大。同时,信号的分辨能力弱、解析力差,能量的使用效率也低,最终结果就是功耗高,以及很难被小型化集成。
APD器件是这样,SiPM器件也是如此,需要把激光器发射功率做得很高、光学系统的尺寸做得很大。而SPAD从光子进入到转化为电信号都是数字化的,规避了这些弱点,体积上的小型化集成也就顺理成章了。
大面阵和小面阵
众所周知,激光雷达的芯片化是其未来发展的三大趋势之一。
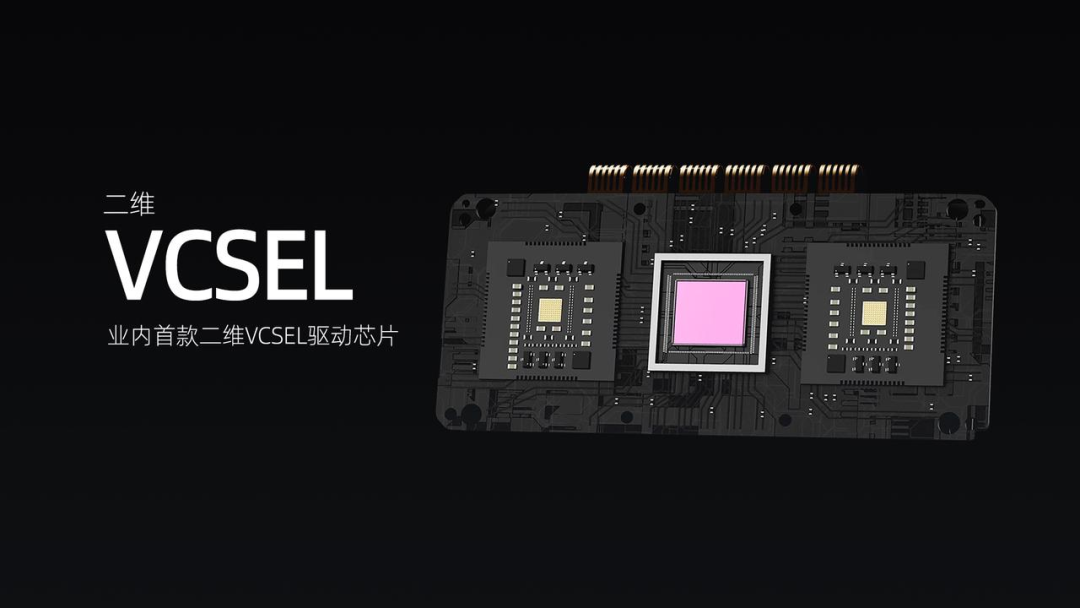
激光雷达的芯片化程度越高、芯片的集成度越高,成本就越低。在dToF(Direct Time of Flight)激光雷达中,业内取得共识并默认的是,芯片化的VCSEL+SPAD面阵是降本的大方向。

其中,虽然近几年国内有很多家VCSEL芯片供应商进入成熟量产阶段,可以提供比较丰富的选择,但SPAD芯片技术主要掌握在索尼、滨松、安森美等国际供应商里。尤其是用于车载激光雷达的大面阵SPAD芯片,只有“绕不过去”的索尼IMX459。
不过,从这次1月份速腾聚创发布的数字化激光雷达来看,亮点也在于突破了大面阵技术难关,成功自研出全球首款激光雷达专用数字化SPAD-SoC芯片M-Core,并实现规模化量产(只是,很重要的产品良率多少,目前不知道)。另外,比较好奇的是,禾赛科技最近官宣自研的SPAD达到什么水平。
转回来说,什么叫大面阵和小面阵呢?
根据此前九章智驾对识光芯科团队的采访,识光团队的解释是,大面阵与小面阵的关键区别在于应用场景、分辨率和探测距离,以及内部集成度和设计难度上的差异。

简单来说,大面阵主要面向车载场景,而小面阵主要面向手机等消费级产品。大面阵既要分辨率足够高,又要探测距离足够长,还要信噪比较低,这对数据采集和处理都提出了很高的要求。
小面阵 SPAD 只需要完成光信号的原始数据采集,信号处理可以交给外部处理器(手机和扫地机器人普遍都是这个架构),但车规大面阵就不行。
车规大面阵的原始数据量往往是消费类小面阵的千倍甚至万倍以上,能达到几百GB/秒甚至TB/秒的量级,以目前的车载网络带宽,远不够处理如此巨大的数据量。
所以,大面阵产生的数据必须在“本地”由芯片自己先处理完,然后再把提取出来的距离和信号特征信息传输给域控制器。
还有,大面阵的芯片尺寸本身也带来了物理层面的挑战。信号通路,供电网络、时钟网络、发热管理、DFM等一系列问题,都需要解决。
其中,“芯片设计面对的本质上是一个二维的平面的世界,伴随芯片面积的增加,信号通路的拥挤程度是几何级数上升的。而且,面阵芯片中的2D寻址(专业术语)又会将设计难度推向一个新的高度。”
包括2D寻址和3D堆叠技术,都是需要攻克的难关。而随着禾赛科技、速腾聚创等中国企业的技术突破,激光雷达的未来发展非常可期。
905nm胜出?
还有一个很有意思的事,数字化的激光雷达还涉及到激光收发系统的905nm和1550nm路线之争。
而前面所说的SPAD,是根据系统集成度的不同,已进入量产阶段的TOF激光雷达的激光发射系统可分为EEL(边发射激光芯片)和VCSEL(面发射激光芯片),接收系统可分为APD与SPAD。
根据光源波长的不同,激光收发系统则主要分为905nm与1550nm两个大类。虽说根据业内人士的说法,“车企现在对905nm和1550nm都不是特别满意。”但是,站在第三方的角度来看,目前是905nm路线占主流。
业内的说法是“FMCW(frequency-modulated continuous-wave,调频连续波)天然是1550nm”,但是目前车端所用、头部企业量产的还是dTOF。也就是说,FMCW阵营所采用的1550nm路线目前在车端还处于非主流状态。
一个重要的区别是,905nm用的是半导体激光器,而1550nm采用的则是光纤激光器,从目前来看,虽然1550nm波段在激光雷达领域的应用要早于905nm,然而行业的硅基基础决定了,半导体激光器落地要容易得多。这也是905nm胜出的根本原因。
还有,这两种激光器在原理上的差异也影响到了电光转换效率(激光雷达将电能转换为光波的效率)。
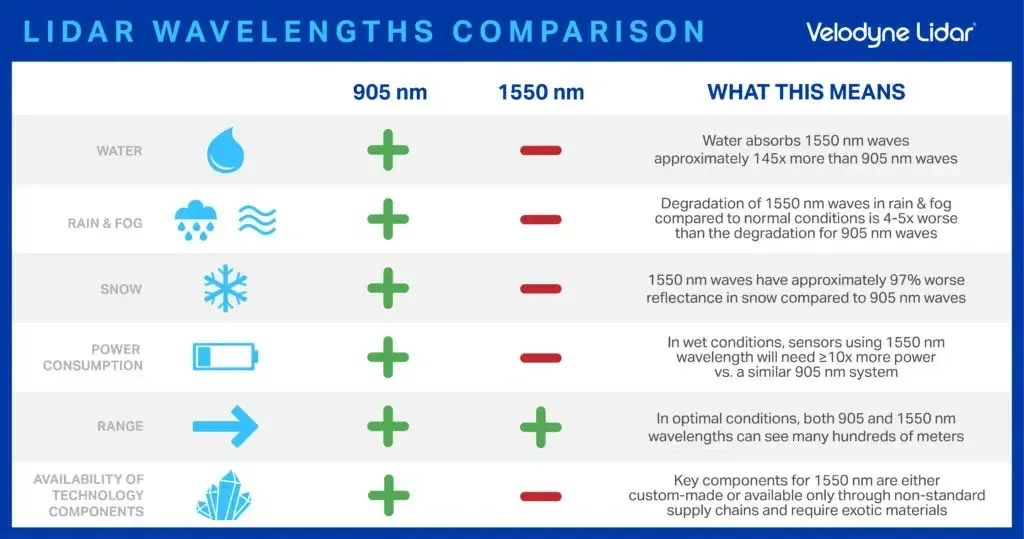
目前行业內的共识是,总体上,1550nm的电光转换效率比905nm低。
据禾赛提供的数据,905nm的VCSEL激光器的电光转化效率在消费类电子里面可能达到40%,在激光雷达里面接近20%,而1550nm的电光转换效率则只有10%出头。
而且,综合业内的分析,1550nm激光器功耗高、散热难这个问题目前基本上是无解的。因而,其功耗也无法降低至跟905nm同等的水平。
按禾赛的说法,能享受到单光子探测器SPAD这一红利的,主要是905nm,1550nm要做成车载环境下可正常使用的单光子探测器“难度极大”。
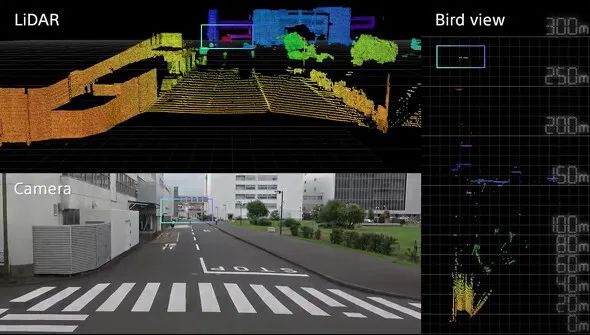
所以,从目前来看,激光雷达的数字化建立在SPAD的基础上,算是天时地利人和。毕竟,经由SPAD输出的规整点云数据,天然具备和数字图片的像素数据融合的优势,直接输出的高质量数字信号,也更容易和IMU等其他传感器数据融合。
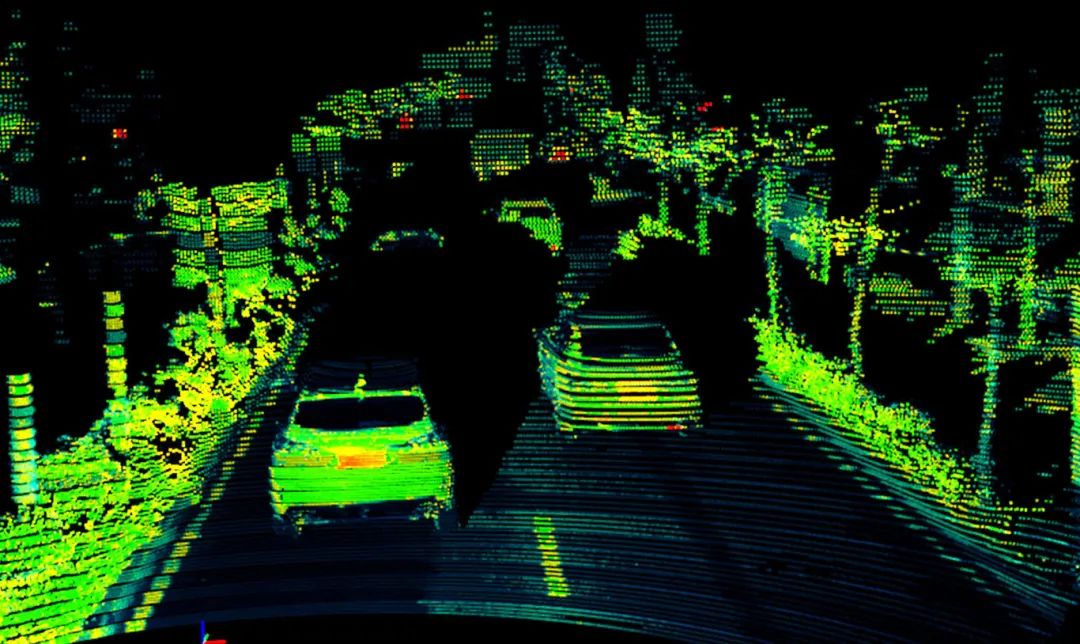
此外,非常重要的一点在于,这些产出的原始点云数据可以直接输入神经网络参与AI算法,甚至和时空维度上精准对齐的视频数据进行融合,开启“3D主动视觉+AI”的无限想象空间。
总之,激光雷达进入数字化时代后,随着成本不断降低,全视觉路线的冲击和威胁反而越来越小。这也为激光雷达的后续发展铺平了道路。可以说,激光雷达的数字化,太重要了。

吉利银河升级成品牌 吉利发布更安全的千里浩瀚智驾

吉利银河升级成品牌 吉利发布更安全的千里浩瀚智驾
3月3日,吉利正式发布了统一的智驾解决方案——“千里浩瀚”。千里浩瀚是更安全的智驾系统,吉利银河未来的全新产品都将搭载千里浩瀚,真正实现智驾平权与安全平权。同时,吉利还宣布吉利银河系列正式升级为“吉利银河品牌”,银河翼真将成为吉利银河高端电动MPV系列。吉利银河品牌将以全面领先的......

银河升级成品牌 吉利发布更安全的千里浩瀚智驾

比亚迪×大疆发布“灵鸢”智能车载无人机系统,展现强强合作典范

三电双智+云驰架构,广汽本田P7以技术底蕴重塑纯电驾趣标杆

2025年3月2日,在深圳,比亚迪联合大疆共同举办了发布会,正式推出了名为“灵鸢”的智能车载无人机系统。该系统实现了车辆与无人机的全面整合,其中,“灵鸢”换电版本主要配备于仰望品牌车型,而快充版本则主要应用于比亚迪的王朝系列、海洋系列、腾势系列以及方程豹系列。至于价格,该系统定价......
比亚迪携手大疆发布智能车载无人机系统—灵鸢
吉利银河品牌的产品矩阵将进一步完善,包含了精品GEOME系列、主流精品车系列、高端MPV系列,涵盖了轿车、SUV、MPV、硬派越野等多种新能源车型,将以全面领先的智能科技,迈向“百万银河时代”,致力于成为“新能源精品车的引领者”。

AI赋能泊车、行车全场景 吉利千里浩瀚实现智驾平权与安全平权

2月28日,启辰全新大V DD-i虎鲸正式上市,限时权益价12.59万元起,以旧换新价9.99万元起。

别克启用新能源定价模式,全面开启品牌“一口价”

中国一汽与零跑汽车签署《战略合作谅解备忘录》

【乐阳频道】吉利银河升级成品牌 吉利发布更安全的千里浩瀚智驾

吉利银河升级成品牌 吉利发布更安全的千里浩瀚智驾

强强联合!比亚迪联合大疆共同打造灵鸢智能车载无人机系统

比亚迪又出普世科技,6万元的无人机系统只卖1.6万
3月3日,吉利正式发布了统一的智驾解决方案——“千里浩瀚”。千里浩瀚是更安全的智驾系统,吉利银河未来的全新产品都将搭载千里浩瀚,真正实现智驾平权与安全平权。同时,吉利还宣布吉利银河系列正式升级为“吉利银河品牌”,银河翼真将成为吉利银河高端电动MPV系列。吉利银河品牌将以全面领先的......
吉利银河升级成品牌 吉利发布更安全的千里浩瀚智驾

比亚迪携手大疆发布智能车载无人机系统——灵鸢












































 京公网安备 11010102004670号
京公网安备 11010102004670号