设想一下,一辆无人驾驶出租车因为在夜间没有开启大灯,涉嫌违章被警察拦下,发现车内并没有人驾驶,当警察试图打开车门时,车辆突然自己启动“逃跑”了。

这不是虚拟场景,而是前不久发生在旧金山街头的一幕。该视频被发布到网上后,引起了众多网友的热议。
随着科技的进步,无人驾驶汽车也从幻想来到了现实。
抛开国外不说,在我国,BAT等互联网巨头入局无人驾驶领域,且在技术研发层面不断深入,让无人驾驶汽车从实验室走向了市场化、商业化的发展阶段。

近日,北京就发放了自动驾驶无人化载人示范应用通知书,百度萝卜快跑和小马智行率先获得无人化自动驾驶出行服务许可。可以说,这是无人驾驶的一次里程碑事件,为将来无人驾驶全面开放应用打下了坚实的基础。
尽管如此,很多人的疑问并没有得到解决:无人驾驶,安全吗?
看一组数据。
根据我国公安部交通管理局发布的《道路交通事故统计年报》数据显示,2017年至2019年,我国交通事故年均发生23.19万起,年均死亡人数高达6.3万人。按照一年365天计算的话,平均每天发生事故就有635起,而死亡人数更是高达172人。
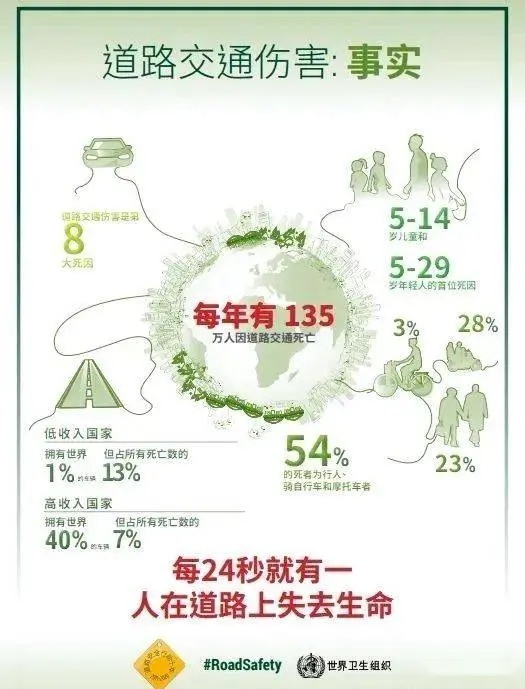
在全球范围内,根据2018年WHO(世界卫生组织)公布的数据来看,全球每年因道路交通死亡的人数高达135万人,意味着每25秒就有一人在交通事故中死亡。看到这些数字的时候,是不是还挺震惊的。
那么,无人驾驶汽车的事故率又是怎样的呢?
我们来看看全球无人驾驶领域最领先的公司Waymo公布的数据。
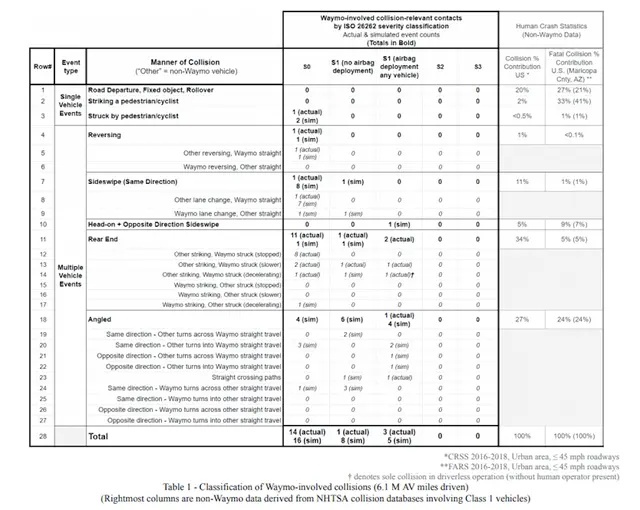
根据它们发布的《Waymo公共道路安全性能数据》报告显示,在2019年1月到2020年9月的这段时间里,在约100平方英里的服务区内,无人车累计行驶了610万英里(约981万公里),Waymo的无人车一共发生18起碰撞或轻微接触事故,并且都没有发生严重或危及生命的伤害。
值得一提的是,在这些事故中,绝大多数都是别人(其它司机或者行人)的错误导致的。而我们人类驾驶汽车发生的交通事故,造成事故的主要原因都是因为我们主观操作失误所导致。
从Waymo报告中的数据中可以看出,无人驾驶已经能够做到相对安全的行驶。
但是,值得注意的是,样本数量有限,并且相比人类驾驶环境也要简单一些,这些数据并不能盖棺定论地证明无人驾驶就比人类驾驶安全。
更不能说明,现在的无人驾驶技术已经成熟。
因为,无人驾驶的“底层逻辑”是通过最大程度地“理性设置”,让事故率趋近于“零”。
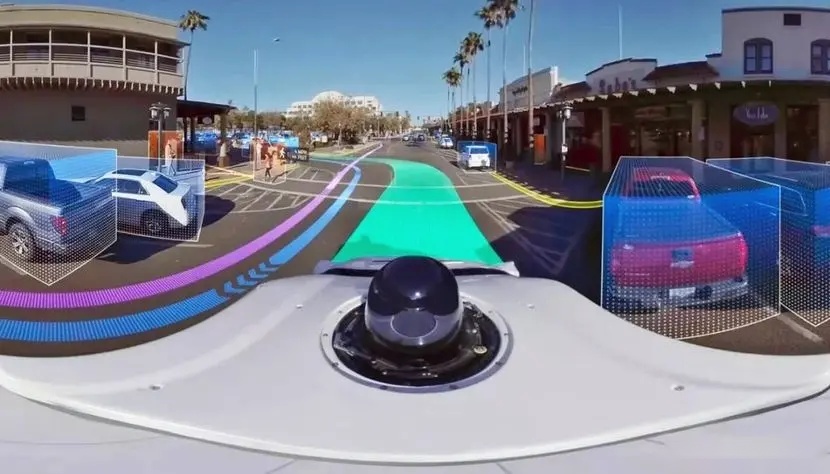
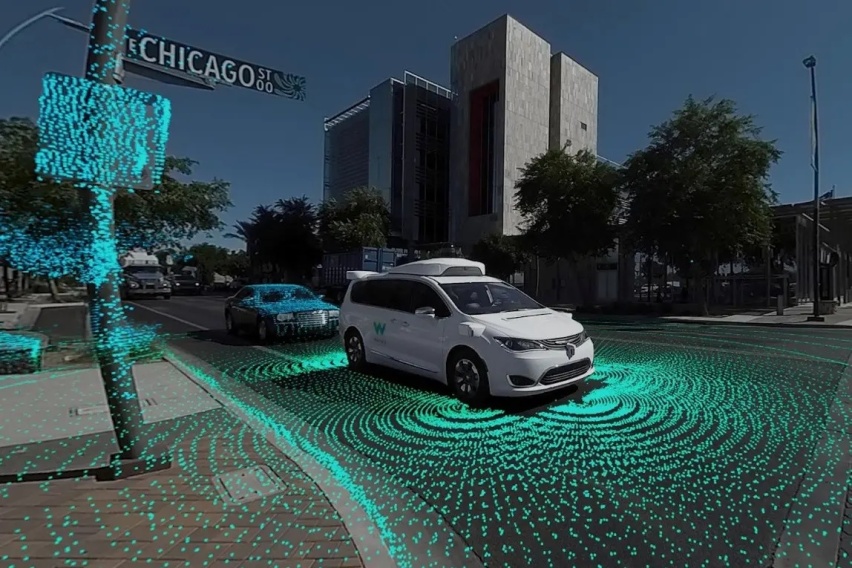
比如,通过摄像头、雷达等精密部件去感知周围环境,再经过准确的感知分析并严格执行,进而就能避免危险情况的发生,并且机器也不会有“疲劳”的时候。
而人类在驾驶汽车时,就会存在非常大的不确定因素,比如疲劳驾驶、路怒、不文明驾驶等行为。这也就是为什么“人”才是造成交通事故的主要原因。
回到核心问题,想要
实现安全的无人驾驶,需要的的什么?

以百度Apollo Moon为例,它采用了2颗激光雷达,13颗摄像头和5颗毫米波雷达的三环视、多冗余的传感器组合,同时,还增加了1颗定制激光雷达和传感器组合。
就是这么一套“组合拳”下来,它能够实现自主掉头、变道、无保护左转等操作,甚至前方遇到违停的车辆还能实现鸣笛、主动刹车和避让动作。
虽然已经能够和人类有着近似的操作水平,但它也只能属于L2级别的自动驾驶,离真正的完全自动驾驶也就是“真无人驾驶”还相差甚远。
这是因为,因为实现无人驾驶的核心问题,是一套足够成熟而且完善的解决方案。想要实现这样的方案,在目前的进程中,仍然有很多难题需要我们去解决。
两条无人驾驶技术路线选择,谁才是最优解?
在目前无人驾驶技术路线中,主要有两条技术路线,一条是单车智能路线,一条是车路协同路线。
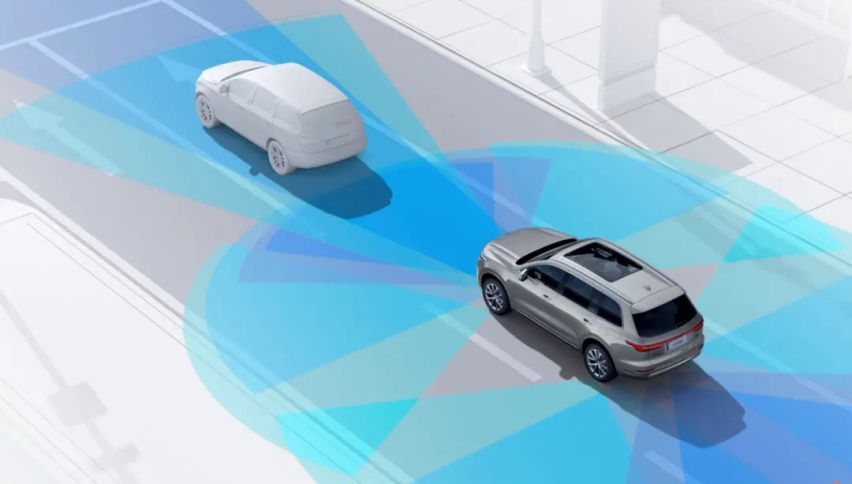
单车智能路线是以雷达、摄像头等多种传感器进行融合,提高车辆感知和判断能力,强调的是车辆本身的能力。但是,为了安全,车辆就必须拥有大量传感器和多层技术冗余去支持,这也使得它的成本很高。

还是拿百度Apollo Moon距离,它的第五代无人车号称业内最低,整车还高达48万元,妥妥的一辆宝马5系的钱。所以,硬件成本居高不下也是影响无人驾驶发展的一个很重要原因。
目前,单车智能技术路线的代表企业有Waymo、通用Cruise,百度Apollo等公司,这也是目前最为主流的技术路线。
与此同时,一辆无人车需要大量的实际道路测试才能达到量产状态。

据2016年的兰德智库报告数据显示,一套自动驾驶系统需要测试110亿英里才能量产。而即便是无人驾驶的头部企业Waymo,其测试里程数也不过千万英里,仍相去甚远。
更为主要的是,在技术层面单车智能存在很大的 “感知局限性”。
目前,单车智能所搭载的传感器无论是摄像头、激光雷达、毫米波雷达还是超声波雷达都存在一定的缺点。
比如,摄像头对光线条件要求较高,在雨雾天、黑夜的情况下其灵敏度会有所下降;激光雷达对雨雾的穿透能力受到限制,对黑颜色的汽车反射率有限;毫米波雷达对动物体的反射不敏感。

智能汽车感知硬件系统无论是摄像头还是雷达,都是基于生物感官的产物,这就会造成有“盲区”现象存在,所以遇见像“鬼探头”这样的突发状况,人类司机都很难避免,单车智能也同样很难避免。

在当下,即便是把自动驾驶技术做到非常优秀的特斯拉,也依然无法摆脱单车智能下,因感知局限而出事故的可能性。
所以,在这种情况下,车路协同路线就受到了行业内的重视。
所谓车路协同,就是汽车端和道路端利用网络进行连接,通过云计算的方式进行相互通信。

举个例子,车辆行驶在一条有信号灯的道路上,当信号灯变为红色时,此时它就会利用网络把这个变红的“消息”传递到车辆上,让汽车慢速行驶,从而避免了等待红灯的情况,大大提高了路口的通行效率。
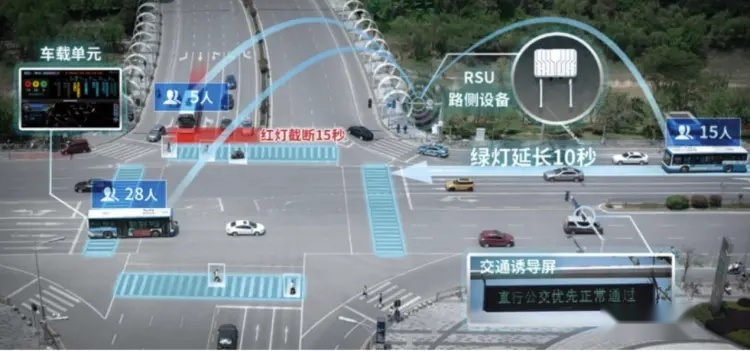
甚至,路面设备监测到有行人突然闯红灯时,还能提前告知车辆,让车辆进行减速,从而避免发生事故。相比单车智能这种“个体控制”来说,车路协同“全体控制”更高效,也更不容易发生危险。
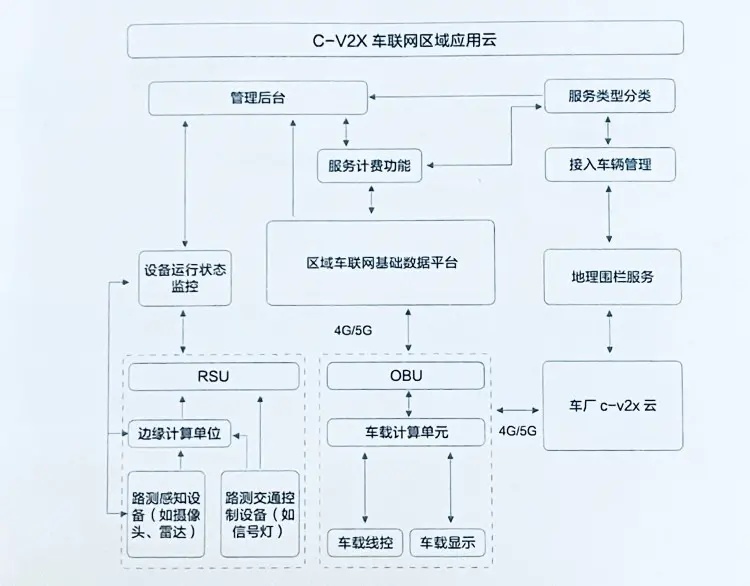
当然,实现“车路协同路线”需要用到C-V2X(蜂窝车联网)技术。
这不仅需要车企的努力,还需要零部件供应商、通信企业、互联网公司以及政府部门通力合作,更需要城市的基础设施达到相应的技术水平才行。
也就是说,车不仅要求算力高、感知算法够完善,而且还需要城市基建设施能够与车辆联网,并且还能通过云端统一控制。
这些说起来简单,但实现起来太难了。
写在最后
如果说车路协同是无人驾驶发展的终局,那么单车智能就是这条终局之路上的基石。
如果没有单车智能的“大算力”“强感知”的基础,即便车路协同有多么的美好,也是水中月,镜中花,无法实现。

比亚迪李云飞:拒绝拉踩营销!比亚迪以工程师文化打造全球新能源名片

无人机霸主俯冲进入扫地机器人战场,一场由技术重构与全球棋局交织的行业变革已然揭幕。深圳科技巨头大疆的触角正悄然伸向智能家居腹地。据悉,历经四年研发,其首款扫拖一体机器人ROMO进入量产阶段,定位中高端市场。
7000MB/s国产PCIe4.0三杰横评:腾隐/致态/朗科谁是速度王者?

2025年6月12日,马德里 —— 在对西班牙进行国事访问期间,中国国家副主席韩正率由商务部部长王文涛、外交部副部长华春莹等组成的政府代表团在马德里会见了西甲联盟。西甲联盟主席哈维尔·特巴斯与西班牙企业组织联合会(CEOE)、西班牙工业和旅游大臣霍尔迪·埃雷乌,以及一批对中西关系......

6月13日,吉利正式发布行业首个基于AI场景引擎的动力域智能体——星睿AI云动力2.0。

既有漂亮时尚的外观,还有更好的音质,价格只要百元,这款开放式蓝牙耳机真的很超值。

369,海力士原厂M-die颗粒,奥睿科DDR5驰刃内存条,实在太炸了

稀土不“稀”,但没有它,从汽车到战斗机核潜艇都不行!

中国厨电市场在 2025 年呈现出典型的寡头竞争格局,方太、老板以 17% 左右的市占率稳居第一梯队,华帝则以 10.03% 的市占率形成差异化竞争态势。

年轻化营销获权威认可! 东风奕派荣获第25届IAI整合营销银奖!

6月12日消息,昨天广汽丰田宣布将与华为、小米、Momenta展开合作,在今天的广汽丰田科技日上,具体的合作细节也被展示了出来。广汽丰田将会接入小米生态,这也使得其成为首家与小米汽车达成实质合作的国际大厂。

当贝X5S Plus
大联大其旗下品佳推出基于微芯科技(Microchip)ATSAME54 MCU和艾迈斯欧司朗(ams OSRAM)EVIYOS 2.0的10Base-T1S万级像素大灯方案。

扎根中国20年,广汽丰田这次决心很大。通过深化“聚变2030”战略,全力推进“中国自研2.0”,他们要掌握定义产品、引领技术和创新的主动权。

HUAWEI Pura 80系列在大幅升级硬件能力的同时,定价与前代产品保持在同一水平。价格方面,HUAWEI Pura 80 Pro建议零售价6499元起,HUAWEI Pura 80 Pro+建议零售价7999元起,两款机型于2025年6月14日10:08正式开售;HUAWE......

混动市场又迎来重磅玩家!6月13日,吉利正式祭出大招,星睿AI云动力2.0,并以此为基础,将自家的王牌混动技术“雷神超级电混”全面升级为雷神AI电混2.0。这不仅仅是名字的改变,更是吉利将AI深度融入混动系统核心的一次重大突破。官方喊出了“最聪明电混”的口号,而更让人咋舌的是,搭......
比亚迪李云飞:拒绝拉踩营销!比亚迪以工程师文化打造全球新能源名片

在前几天小鹏G7预售发布会上,小鹏汽车官宣其自研的图灵AI芯片将首发搭载于小鹏G7上,这款单颗有效算力超过700 TOPS的AI芯片将成为小鹏未来的核心竞争力。

熬夜看书党的救星!这盏台灯让我彻底告别眼疲劳
比亚迪李云飞:年研发投入超 542 亿 比亚迪用技术实力重塑行业竞争格局










































 京公网安备 11010102004670号
京公网安备 11010102004670号